Description Blending enables the robot to smoothly transition between two trajectories, without
stopping at the waypoint between them.
Blending makes your robot program run faster because, when you create a smooth
transition between trajectories, you avoid slowing down an acceleration between
trajectories.
Blend
parameters
Apart from the waypoints, multiple parameters will influence the blend trajectory.
•
the blend radius (r)
•
the initial and final speed of the robot (at positions p1 and p2 , respectively)
•
the movement time (e.g. if setting a specific time for a trajectory this will influence
the initial/final speed of the robot)
•
the trajectory types to blend from and to (MoveL, MoveJ)
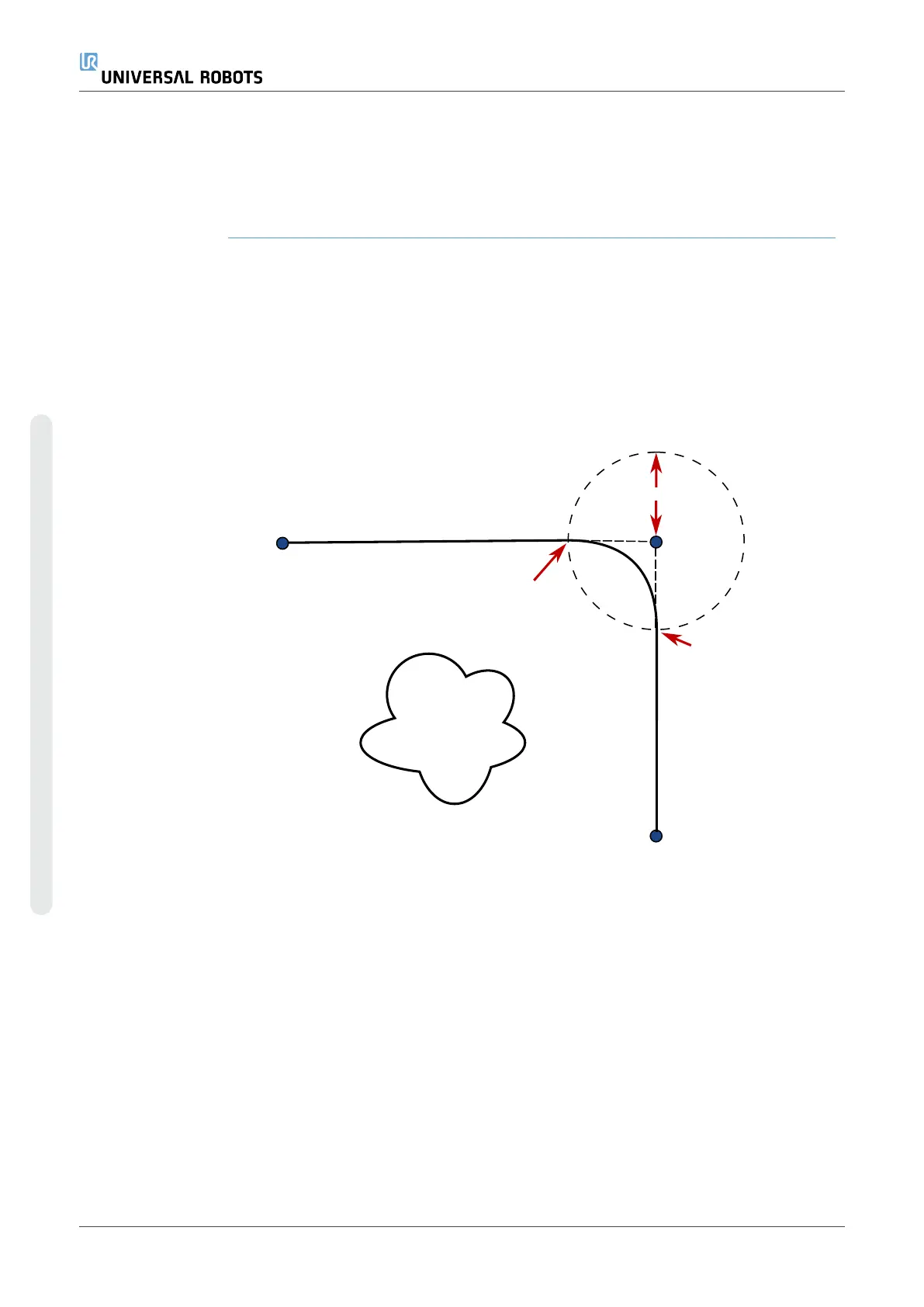
32.2:
Blend over
(WP_2)
with radius
(r)
, initial blend position at
p1
and final blend
position at
p2
.
(O)
is an obstacle.
UR10e 212 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.