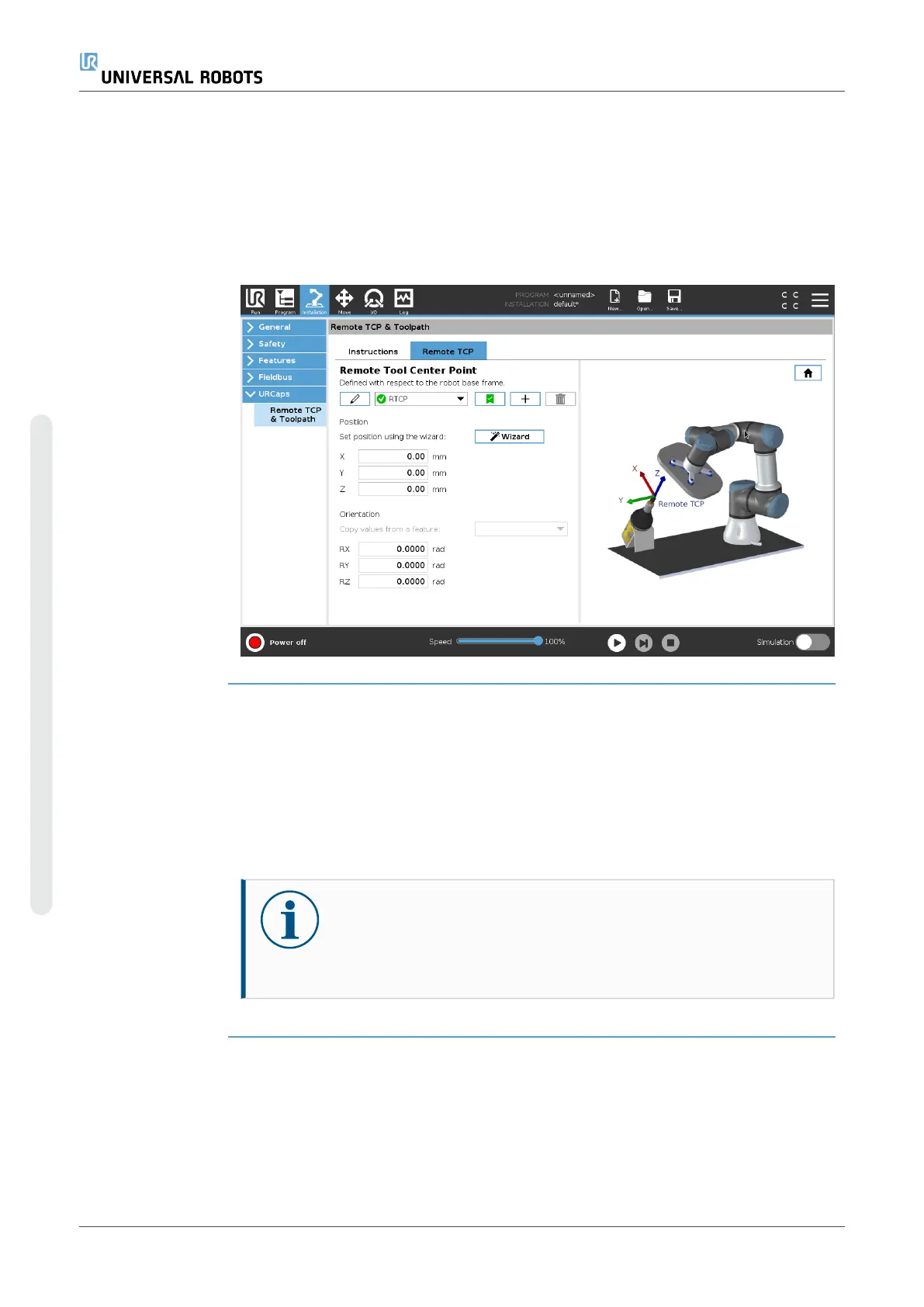
Setting the
Remote TCP
from a Feature
Set an RTCP using a Feature to allow the robot to be jogged relative to the RTCP while
creating RTCP Waypoints and RTCP Circle Moves.
1. Tap the plus icon to create a new RTCP RTCP. Or select an existing RTCP in
the drop-down menu.
2. Tap the Copy values from a point feature drop-down menu and select a
Feature. Verify the RTCP orientation values update to match that of the selected
Feature.
Remote TCP
Movement Types
RTCP_MoveP Similar to a regular MoveP, the RTCP_MoveP defines the tool speed and acceleration
the Robot Arm moves relative to the Remote TCP. See .
RTCP Circle
move
Similar to a regular Circle move, the RTCP Circle move can be added to an RTCP_
MoveP to make circular movements. See .
NOTICE
The maximum speed of a Circle Move may be lower than the specified
value. The circle radius is
r
, the maximum acceleration is
A
, and the
maximum speed cannot exceed
Ar
due to centripetal acceleration.
UR10e 270 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...











