8
1SPHSBN
GPS
HFUUJOHQBSUGSPN1JDLMPDBUJPO
.PWF
UPIPNF
0VUQVU
POUPBDUJWBUFHSJQQFS
1SPHSBN
GPSQMBDFNFOU
PGQBSUTJOSPX
0VUQVU
PGGSFMFBTFHSJQQFS
(P
IPNFBOEQJDLVQBOPUIFSQBSU
"EWBODF
UPOFYUQMBDFMPDBUJPO
%P
QMBDFTQFSSPX
4".4".".".
4FU
TQFFETBDDFMT
1SPHSBNJTTUBSUTFUVQQSPHSBN
.BLFUIJTMPDBUJPO[FSP4UBSU
0VUQVUPOUPBDUJWBUFHSJQQFS
4FU
MPPQ
NBSLFSBMMORRSVZLOOEUDQFKKHUH
0RYHRXWWRVWSODFHORFDWLRQ
MXPSWRSURJUDPWRGRURZ
&OHDURXWDEVROXWHVDYHGPRYHVIURP-0;
PRYHPRWRURYHUQH[WURZ
$GYDQFHDQRWKHUURZURZVDQGUHSHDW
0RWRUVKRPH
/HWJRZLWKJULSSHU
5IJT
1JDLBOE1MBDFFYBNQMFNPWFT
BYJT
NPWFTUSBZPGQBSUTUPBEWBODFOFYUSPX
1MBDJOH
QBSUT
YJOSPXT
5IF
DPNNPO
QJDLTUBSUMPDBUJPOJTTFUUP[FSPBCTPMVUF
0VUQVU
JT
VTFEUPTJHOBMBOFYUFSOBM
HSJQQFS
&
1.
*".
61
1.
6
+.
*.
-
1.
U5,P1
-.
*".
+.
*".
*.
-
*".*".
6
Motors run
Function
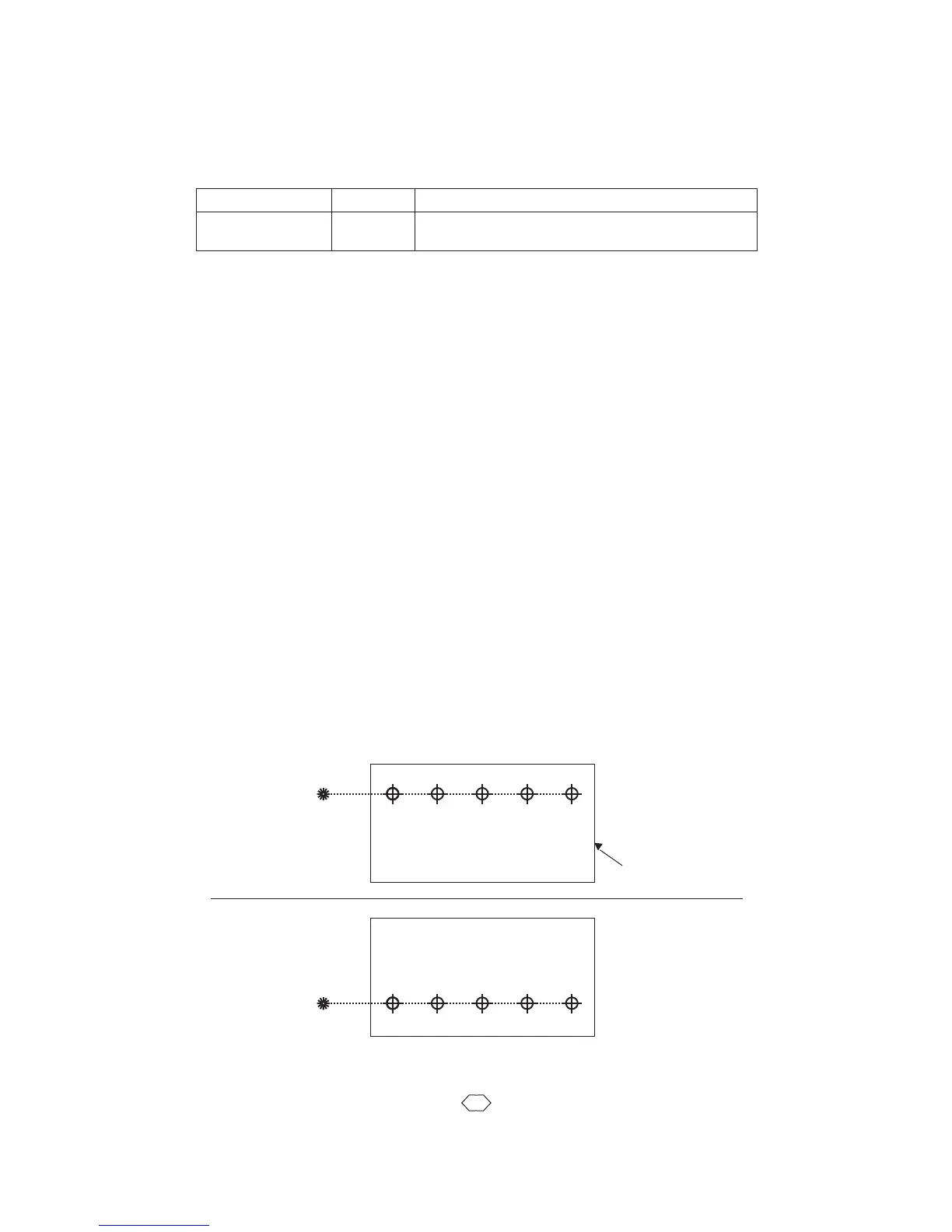
Example #14
Pick and Place
Pick from common point and place
in rows, Y axis moves tray of parts to next row
2
(Pick)
start/end
1 234 5
U5
(Pick)
start/end
®
¬
1 234 5
U4 U4 U4 U4 U4
U5
1
1
2
1st Row
2nd Row
Tray
*".*".
®
¬
U4 U4 U4 U4 U4