Parameterization
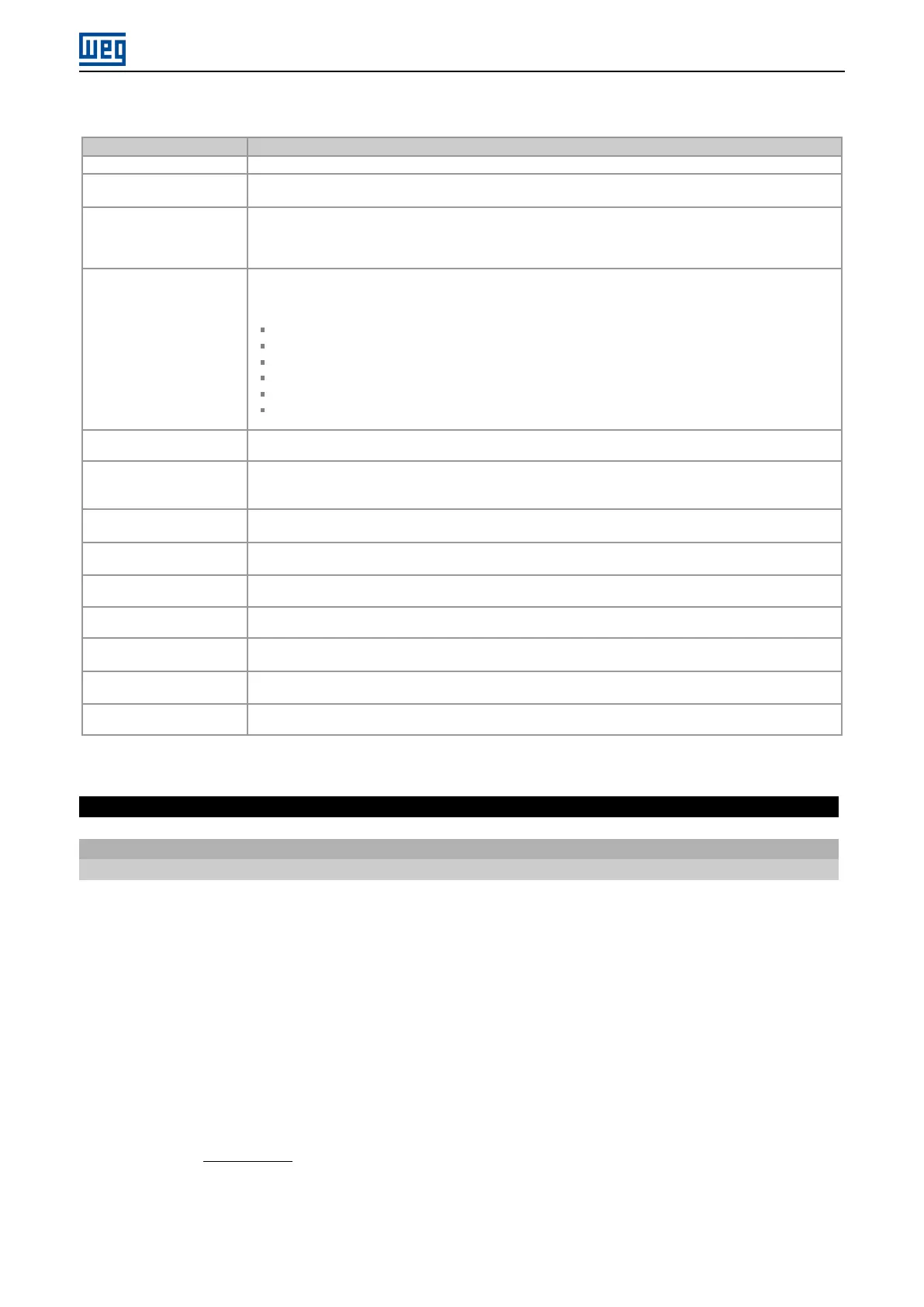
Table 5.2: P0680 parameter bit functions
Bit Value/Description
Bit 0 ... 3 Reserved
Bit 4
Quick stop active
0: The quick stop command is not active.
1: The drive is executing the quick stop command.
Bit 5
Second ramp
0: The drive is configured to use the first ramp values, programmed in P0100 and P0101, as the motor
acceleration and deceleration ramp times.
1: The drive is configured to use the second ramp values, programmed in P0102 and P0103, as the motor
acceleration and deceleration ramp times.
Bit 6
In configuration mode
0: The drive is operating normally.
1: The drive is in the configuration mode. It indicates a special condition during which the drive cannot be
enabled:
Running the self-tuning routine.
Running the oriented start-up routine.
Running the HMI copy function.
Running the flash memory card self-guided routine.
There is a parameter setting incompatibility.
There is no power at the device power section.
Bit 7
Alarm condition
0: The drive is not in alarm condition.
1: The drive is in alarm condition.
Bit 8
Motor Running
0: The motor is stopped (or coast to stop).
1: The drive is running the motor at the set point speed, or executing either the acceleration or the deceleration
ramp.
Bit 9
General enable active
0: General Enable is not active.
1: General Enable is active and the drive is ready to run the motor.
Bit 10
Speed direction
0: The motor is running in the reverse direction.
1: The motor is running in the forward direction.
Bit 11
JOG
0: JOG function disabled.
1: JOG function enabled.
Bit 12
LOC/REM
0: Drive in Local mode.
1: Drive in Remote mode.
Bit 13
Undervoltage
0: No Undervoltage.
1: With Undervoltage.
Bit 14
Automatic (PID)
0: PID in manual mode.
1: PID in Automatic mode.
Bit 15
Fault condition
0: The drive is not in a fault condition.
1: The drive has detected a fault.
P0681 – MOTOR SPEED IN 13 BITS
Range: -32768 ... 32767 Default: -
Properties: RO
Description:
It allows monitoring the motor speed. This word uses 13-bit resolution with signal to represent the motor synchronous
speed:
P0681 = 0000h (0 decimal) → motor speed = 0
P0681 = 2000h (8192 decimal) → motor speed = synchronous speed
Intermediate or higher speed values can be obtained by using this scale. E.g., for a 4 pole motor and 1800 rpm of
synchronous speed, if the value read is 2048 (0800h), then, to obtain the speed in rpm one must calculate:
8192 ⇒ 1800 rpm
2048 ⇒ Speed
Speed =
2048 × 1800
8192
Speed = 450 rpm
Negative values in this parameter indicate that the motor is running in the reverse direction.
CFW11 | 14