Object Dictionary
7 OBJECT DICTIONARY
The object dictionary is a list containing several equipment data which can be accessed via EtherCATnetwork. An
object of this list is identified by means of a 16-bit index, and it is based in that list that all the data exchange between
devices is performed. Any object of this list can be accessed via SDO, and objects related with the control, operation
and monitoring of the equipment can be mapped to cyclical communication via PDOs.
The objects are divided into groups with different functions. The main groups are:
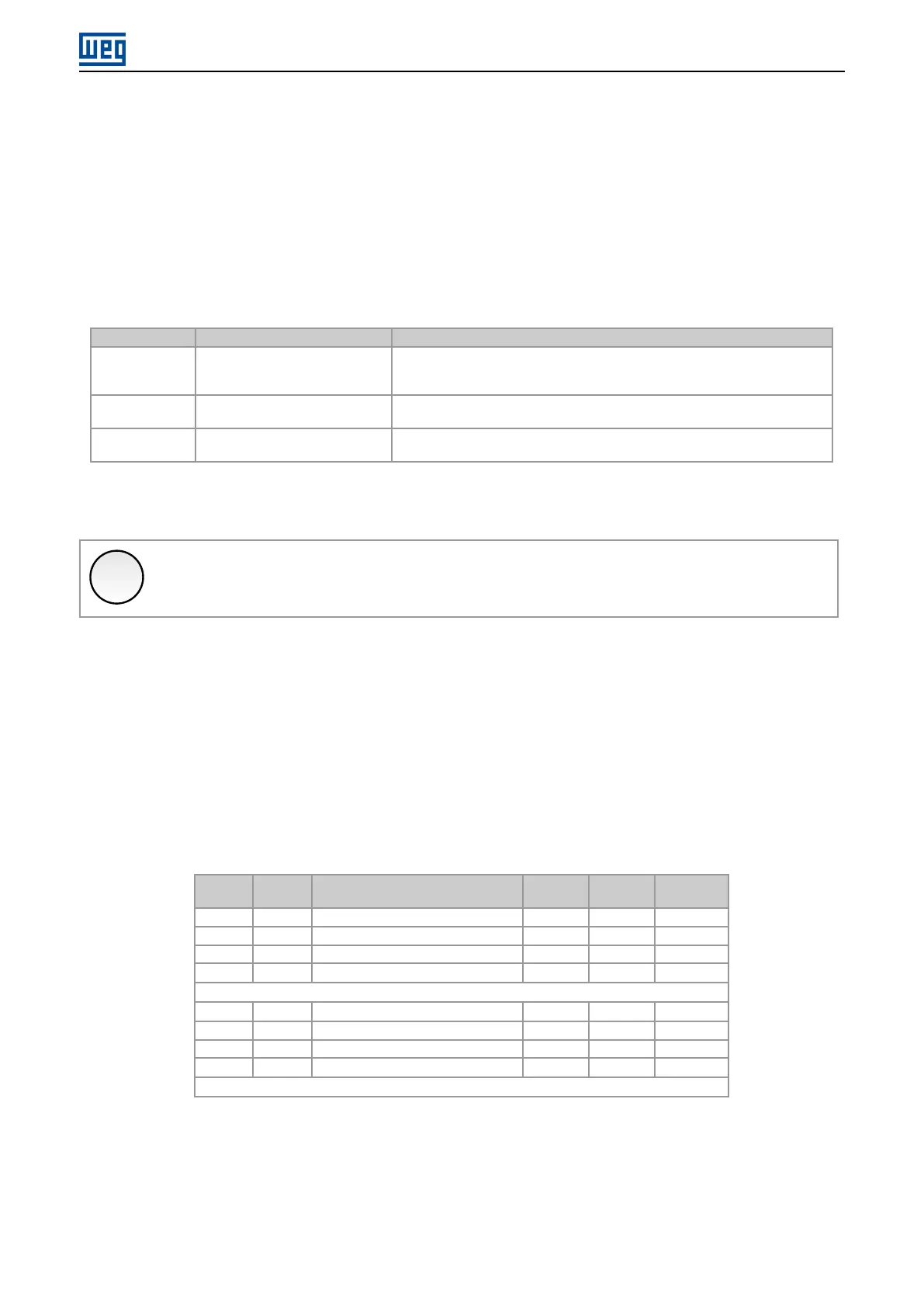
Table 7.1:
Groups for Object Dictionary
Index Objects Description
1000h – 1FFFh Communication objects They are objects common to all the CANopen devices. They contain
general information about the equipment and also data for the communication
configuration.
2000h – 5FFFh Manufacturer specific objects In this range, each CANopen equipment manufacturer is free to define which
data those objects will represent.
6000h – 9FFFh Standardized device objects This range is reserved to objects that describe the behavior of similar equipment,
regardless of the manufacturer.
The other indexes that are not referred in this list are reserved for future use.
✓
NOTE!
The configuration file in XML brings the full list of objects in the equipment, as well as their properties
with respect to type, default values, and mapping for PDOs
7.1 MANUFACTURER SPECIFIC
For indexes from 2000h to 5FFFh, each manufacture is free to define which objects will be present, and also the type
and function of each one. In the case of the CFW11, the whole list of parameters was made available in this object
range. It is possible to operate the CFW11 by means of these parameters, carrying out any function that the drive
can execute. The parameters were made available starting from the index 2000h, and by adding their number to this
index their position in the dictionary is obtained. The next table illustrates how the parameters are distributed in the
object dictionary.
Table 7.2: Object List – Manufacturer Specific
Index
Sub-
index
Name Type Access
PDO
Mapping
2000h 0 P0000 – Access parameter INT16 rw No
2002h 0 P0002 – Motor speed INT16 ro Yes
2003h 0 P0003 – Motor current INT16 ro Yes
2004h 0 P0004 – DC link voltage INT16 ro Yes
...
22A8h 0 P0680 – Logical status UINT16 ro Yes
22A9h 0 P0681 – Speed in 13 bits INT16 ro Yes
22ACh 0 P0684 – Control Word UINT16 ro Yes
22ADh 0 P0685 – Speed reference INT16 ro Yes
...
In order to be able to program the device operation correctly via the network, it is necessary to know its operation
through the parameters.
CFW11 | 25