definition of control mode.
The setting is prohibited except the following values.
Stop at once, PDS state migrates to Switch on.
The control mode is PP, PV: motor stop through 0x6084 (Profile
deceleration), PDS state migrates to Switch on.
The control mode is HM: motor stop through 0x609Ah (Homing
acceleration), PDS state migrates to Switch on.
The control mode is TQ: motor stop through 0x6087 (Torque Slope),
PDS state migrates to Switch on.
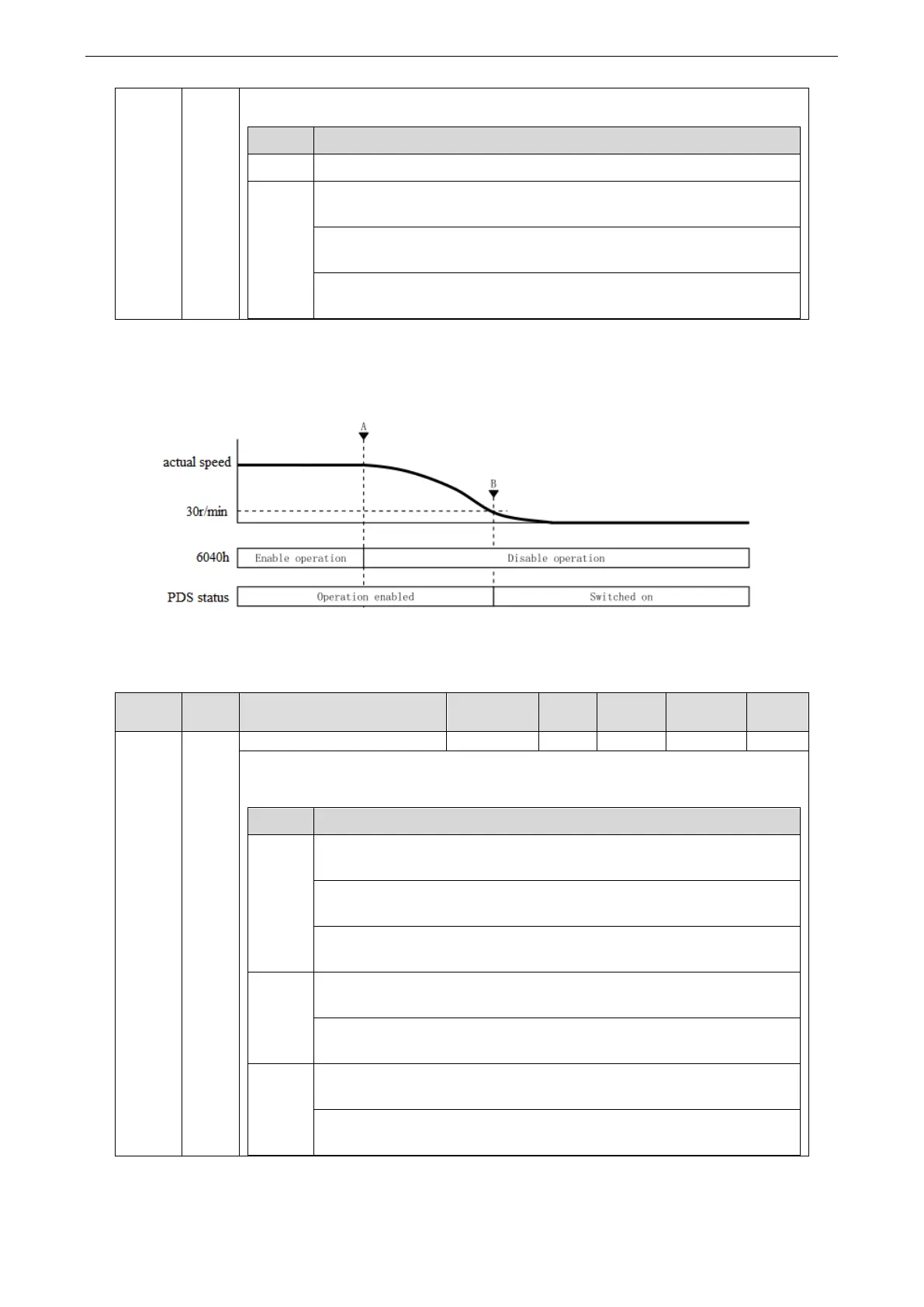
Examples of deceleration stop action according to the Disable operation command:
If the PDS command「Disable operation」is received, it will start to decelerate and stop.
PDS status during deceleration remains Operation enabled.
The PDS status after stop is Switched on.
4. Halt option code (605Dh)
Set the motor deceleration stop mode when 6040h (Controlword) bit8 (Halt) is 1.
Set the time sequence of Halt. It is different according to the definition of control
mode.
The setting is prohibited except the following values.
The control mode is PP, PV: motor stop through 0x6084 (Profile
Deceleration), PDS status migrates to Operation enabled
The control mode is HM: motor stop through 0x609A (Homing
Acceleration), PDS status migrates to Operation enabled
The control mode is TQ: motor stop through 0x6087 (Torque Slope),
PDS status migrates to Operation enabled
The control mode is PP, PV, HM: motor stop through 0x6085 (Quick
Stop Declaration), PDS status migrates to Operation enabled
The control mode is CST, TQ: motor stop through 0x6087 (Torque
Slope), PDS status migrates to Operation enabled
The control mode is PP, PV, HM: motor stop through 0x60C6 (Max
Deceleration), PDS status migrates to Operation enabled
The control mode is TQ: motor stop through torque 0, status migrates
to Operation enabled
Examples of deceleration stop action according to Halt function:
If 6040h: bit8(Controlword: halt) changes from 0 to 1, it will start to decelerate and stop.
PDS status during deceleration remains Operation enabled.
 Loading...
Loading...

