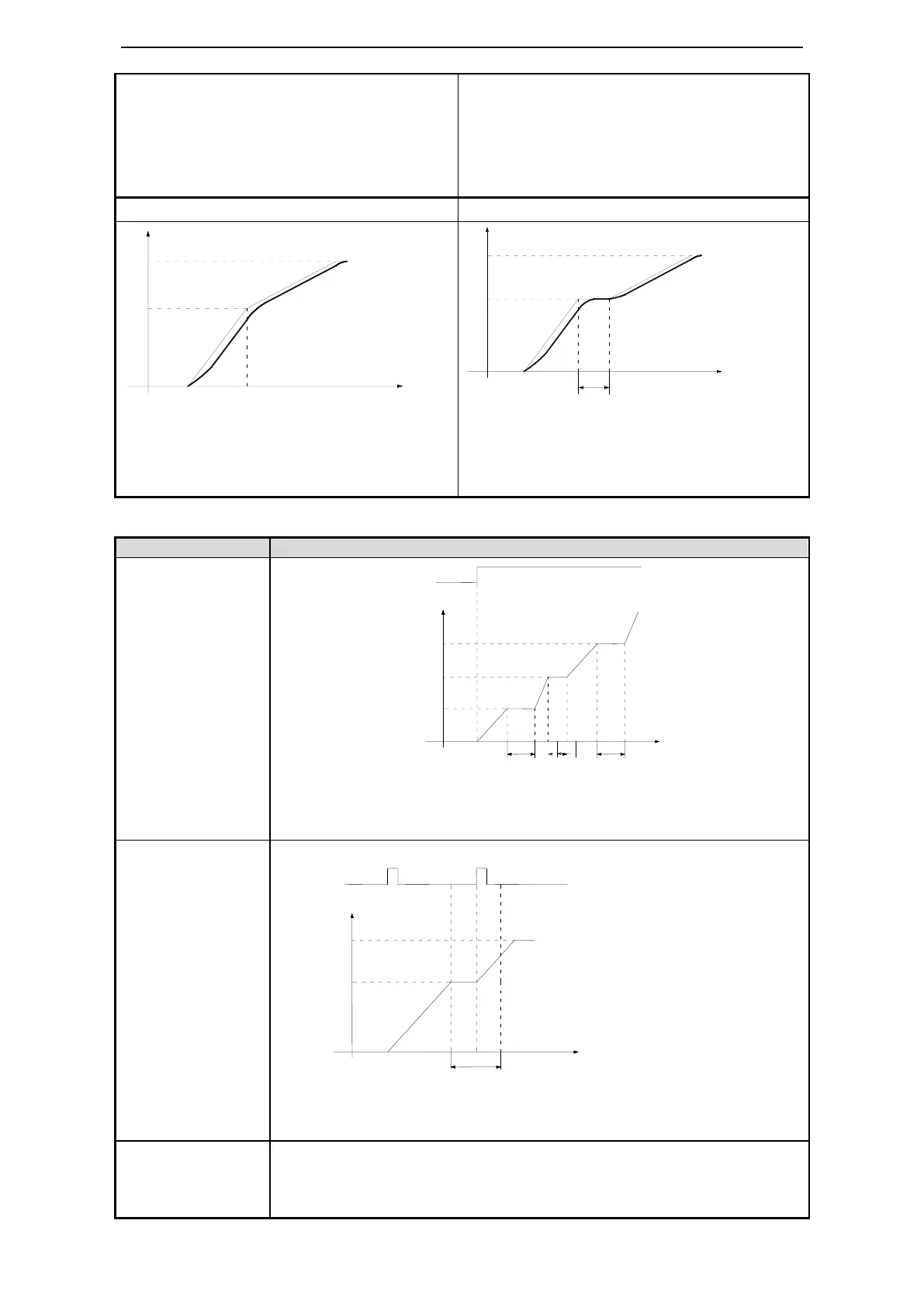
After the drive output 1-segment position
command, it will wait for the completion of
motor positioning, and then start the next position
command at once. T1 is positioning time, which
means the time from pulse output complete to the
output of positioning completion signal.
After the drive output 1-segment position
command, it will wait for the completion of motor
positioning, and pass the adjust time, then start the
next position command. T1 is positioning time, t2
is adjust time. Refer to parameter P4-11.
Wait mode = 1, adjust time = 0ms
Wait mode = 1, adjust time > 0ms
After the drive output 1-segment position
command, it will not wait for the completion of
motor positioning, and start the next position
command at once.
After the drive output 1-segment position
command, it will not wait for the completion of
motor positioning, but pass the adjust time, and
then start the next position command. T2 is adjust
time. Refer to parameter P4-11.
(2) Change step mode
Change the step
when signal is ON,
recycling
t1=P4-11, t2=P4-21
1. If /CHGSTP is ON, servo will run segment 1 and 2.
2. If /CHGSTP is OFF in one segment, servo will finish this segment and stop
running the next segment.
1:
Change the step at
the rising edge of the
signal, single-step
run
Suppose there are 2 segments. t1=P4-11
In this mode, the adjust time is ineffective. The servo will run the next
command once the current pulse is finished.
 Loading...
Loading...


