6 Servo gain adjustment
6-1.Gain parameter adjustment
The servo system contains position loop, speed loop, current loop which are the core of
servo system. The parameters related to the three loops are gain(Kp), the integral time
constant(Ki), response level, filter time, feedforward gain, etc. These parameters determine
the performance of the entire system. DS3 has two groups of gain parameters which can
automatic switching. The switching condition can be set according to user requirements.
6-1-1. Gain parameters
Some parameters may not fit the system requirements after the external load changed. There are two
groups of parameters for users.
Group one:
First Speed loop gain (Kp)
First Speed loop integral time constant (Ki)
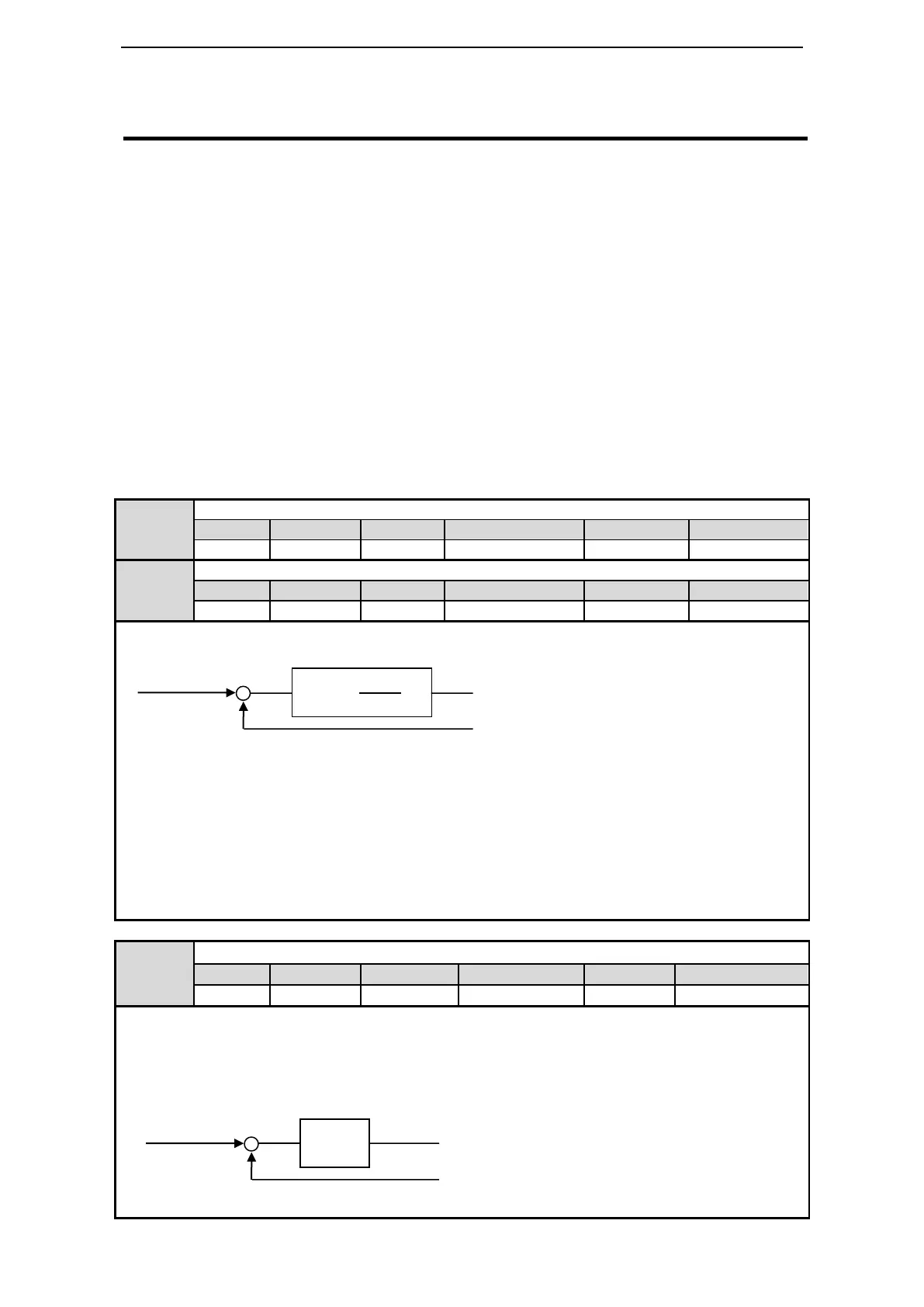
Speed loop gain:
To set the speed loop gain larger and the speed integral time constant smaller can realize high response
speed controlling. But servo will restrict by machine performance. We suggest to increase or decrease
the parameter by the unit of 5 or 10.
It will cancel the integral function when integral time constant is 0 or 10000. It will keep the integral
when integral time constant is 9999.
First Position loop gain(Kp)
To do position control with high response and less offset needs to set the position loop gain larger. But
servo will restrict by machine performance. We suggest to increase or decrease the parameter by the
unit of 5 or 10.
 Loading...
Loading...



