Gain switching condition setting Related parameter
P1-
14.1
condition Diagram
P1-15
Wait
time
P1-16
Grade
threshol
d
P1-17
thresho
ld
Hystere
sis loop
5
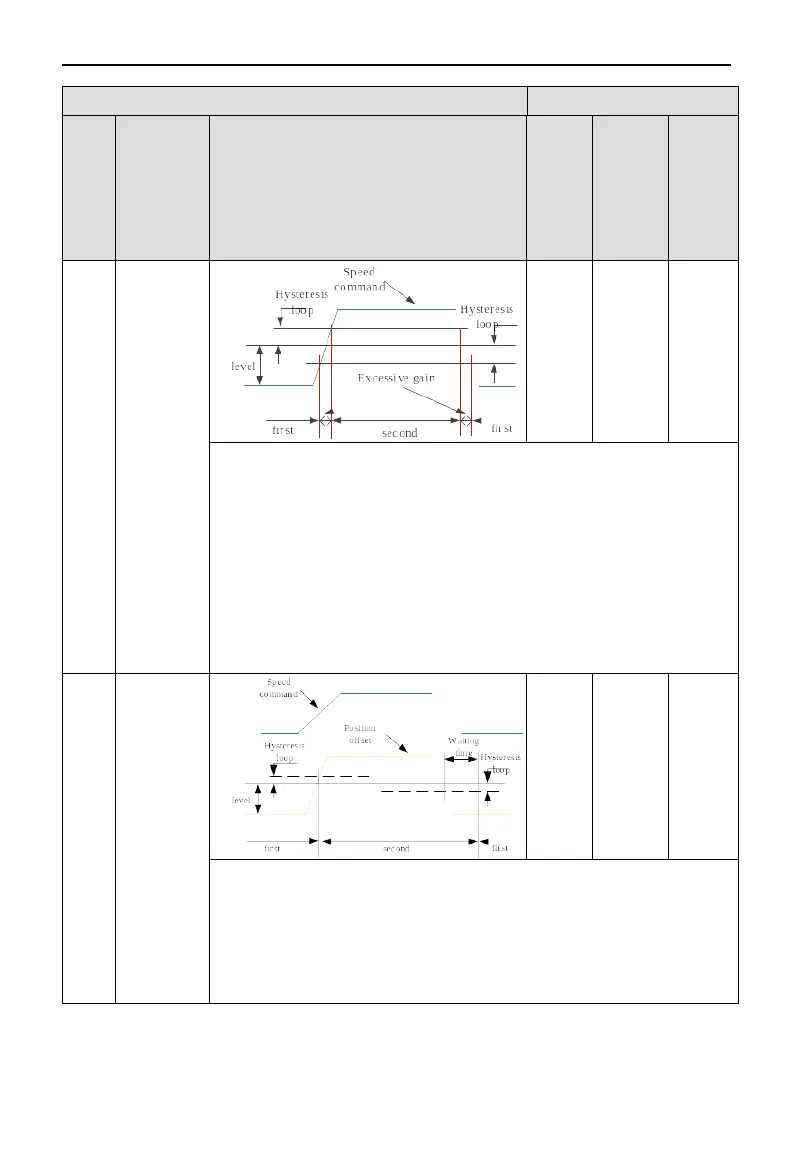
Speed
command
high and
low speed
threshold
[not
supported
temporarily
]
Invalid
Valid(r
pm)
Valid(
rpm)
In the last first gain, when the absolute value of the speed command exceeds (level-
hysteresis) [RPM], switch to the second gain, and the gain gradually changes. When
the absolute value of the speed command reaches (level + hysteresis) [RPM], the
gain completely changes to the second gain;
At the last second gain, when the absolute value of the speed command is lower
than (level + hysteresis) [RPM], it starts to return to the first gain, and the gain
changes gradually. When the absolute value of the speed command reaches (level-
hysteresis) [RPM], the gain completely returns to the first gain.
6
Position
offset
Valid
Valid
(encoder
unit)
Valid
(encode
r unit)
Valid only in position mode (other modes are fixed as the first gain)
When the absolute value of position deviation exceeds (level + hysteresis) [encoder
unit] at the last first gain, switch to the second gain; In the last second gain, the state
when the absolute value of the position deviation is less than (level-hysteresis)
[encoder unit], and then wait until P1-15 remain in this state, return to the first gain.
68
 Loading...
Loading...

