cases, if the number of pulses per revolution is calculated as a decimal, the electronic gear ratio should
be considered.
(2) When P0-13 and P0-14 exceed the setting range, please divide the electronic gear ratio into
numerator and denominator. If the ratio still exceeds the parameter setting range, please use the second
gear ratio P0-92~P0-95. Only when P0-11~14 = 0, the second gear ratio takes effect.
(3) The resolution of DS5 series servo motor encoder is 131072 (17 bits) and 8388608 (23 bits).
(4) The command unit does not represent the machining accuracy. On the basis of the mechanical
accuracy, refining the instruction unit quantity can improve the positioning accuracy of the servo
system. For example, when using the lead screw, the mechanical accuracy can reach 0.01mm, so the
unit equivalent of 0.01mm is more accurate than the unit equivalent of 0.1mm.
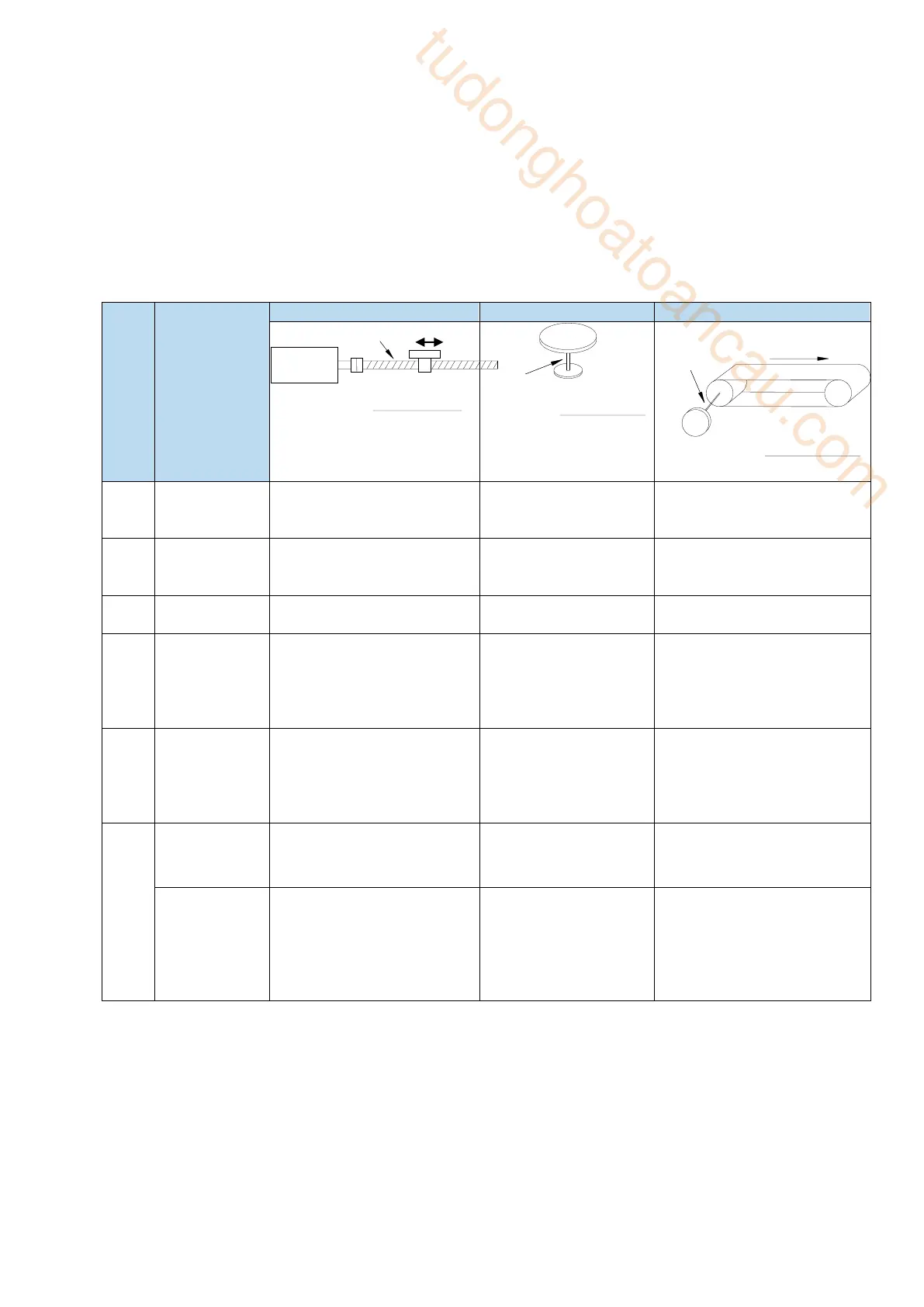
3. Example of setting the electronic gear ratio
 Loading...
Loading...
