synchronous.
S0: synchronous motion speed times (floating number), which is master and slave axis speed.
S1: master axis no.N, the range of N is from 1 to 10.
S2: slave axis no.N, the range of N is from 1 to 10.
● the synchronous speed mode depends on S0:
(1) S0 is negative value: slave axis keeps synchronous motion with master axis as reverse speed
times |S0|.
(2) S0 is 0, the slave axis bundles with master axis, but the slave axis speed is 0.
(3) S0 is positive value, slave axis keeps synchronous motion with master axis as speed times
S0.
● it can bundle when master and slave axis stop.
If the master axis stop, the slave axis is running, the slave axis cannot be bundled, the slave
axis will stop after the instruction end.
● Modify the synchronous speed times through register (SD2038+60*(N-1)), the times must be
floating number.
● it can use with MOTO, MOTOA, MOTOS, MOSTOP to do synchronous motion.
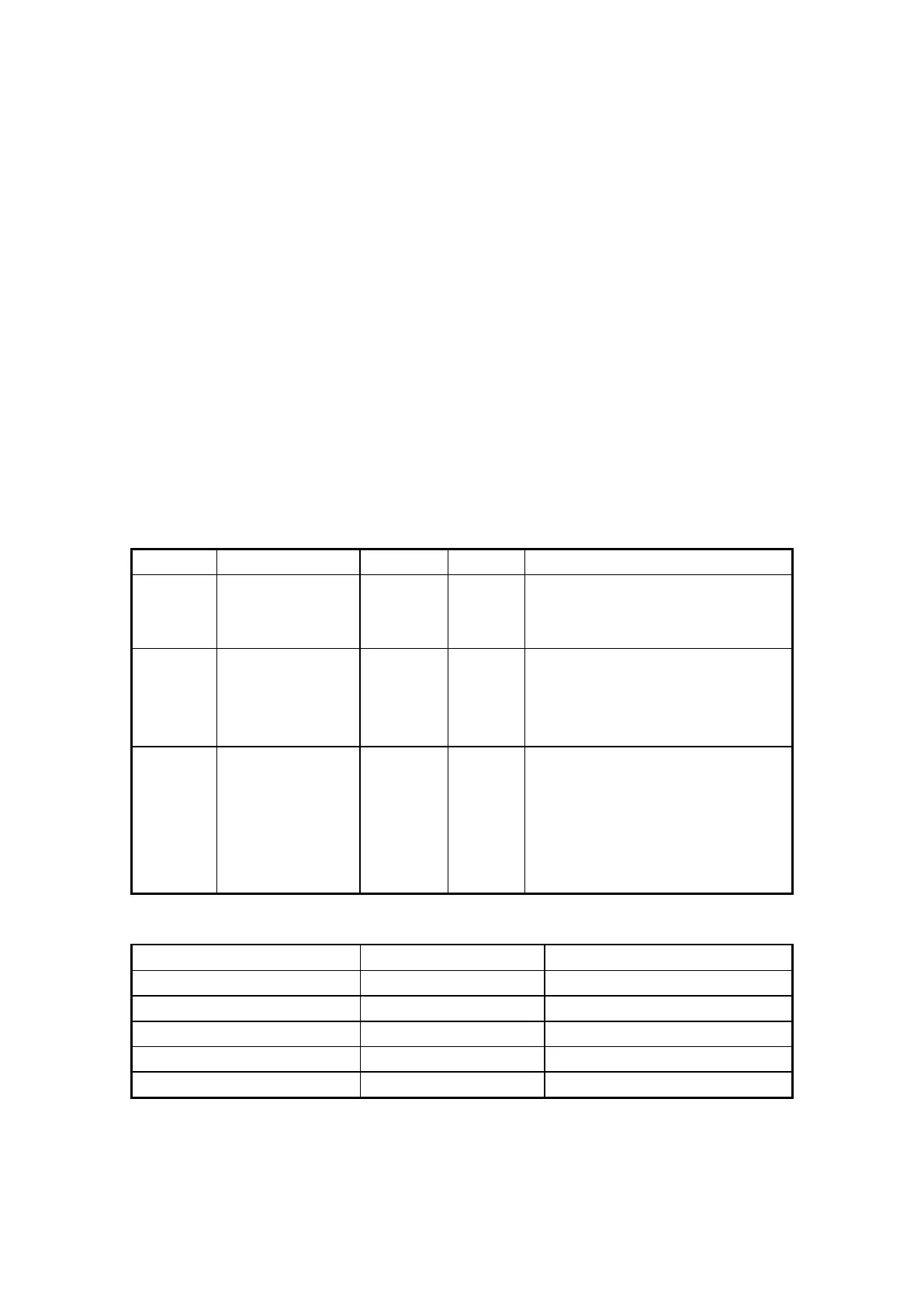
Table 1: parameters (N=1~10)
Synchronous
motion speed
times
Motion axis speed/ target axis speed
Positioning
completion width
Positioning complete threshold, if the
difference between setting value and
encoder feedback value is less than
this value, the running flag is OFF
synchronous
completion width
Synchronous complete threshold. The
speed difference between the two axes
is less than the threshold and position
difference is less than
SFD_UC_NT_Complement, then
SM_UC_NT_GetSync set ON
Table 2: state bit (N=1~10)
ON: keep synchronous state
 Loading...
Loading...