Appendix ES2 Series Servo User Manual Lite V1.0
40
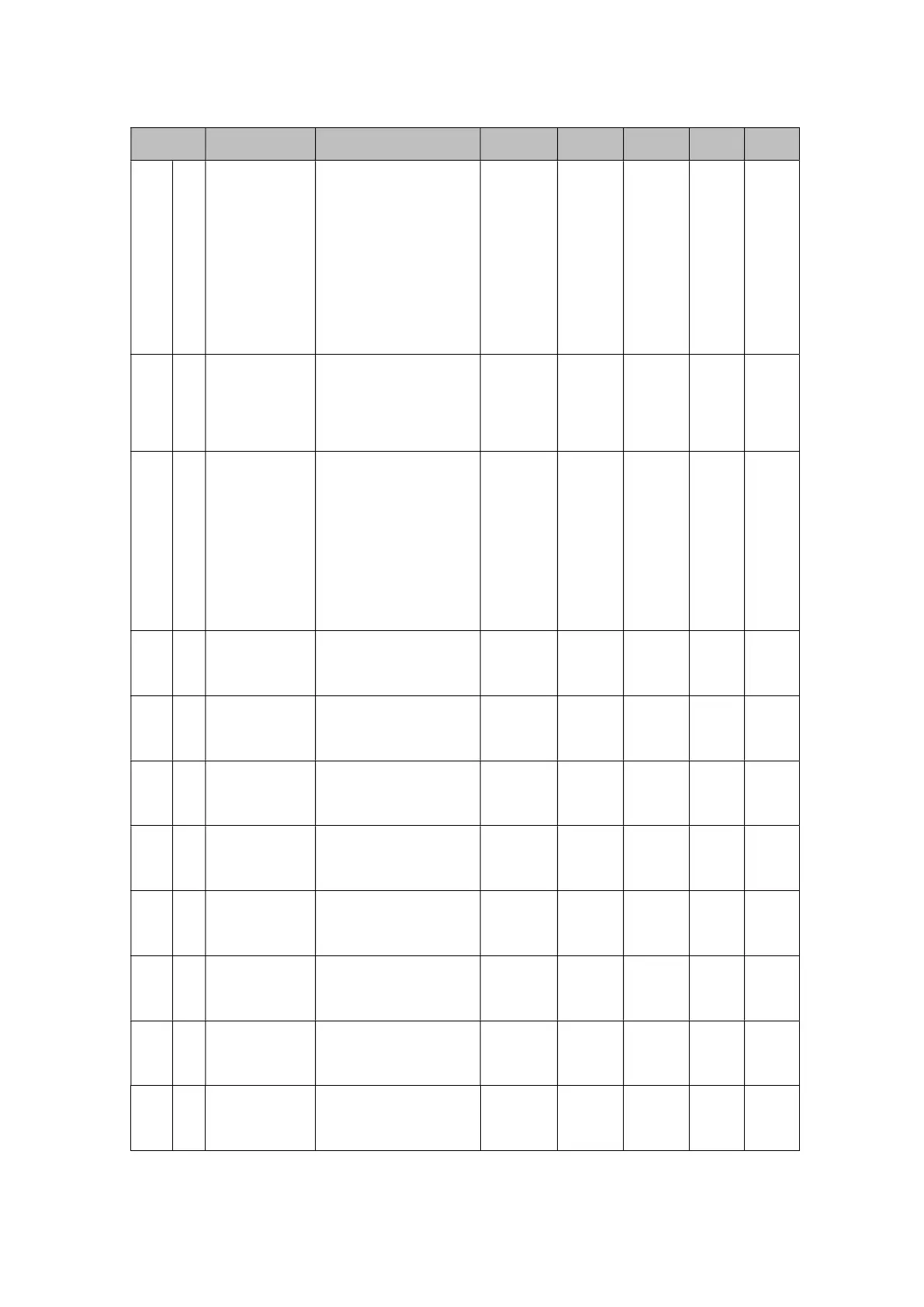
P00 group: basic control parameters
Function
code
Name Setting range Min. unit
Default
setting
Effectiv
e time
Type
Mode
P00
00
Control mode
selection
0-position mode
1-speed mode
2-torque mode
3-speed / torque mixing
mode
4-position / speed mixing
mode
5-position / torque mixing
mode
6-reserved
7-pulse/speed mixing
mode
1 0
Effectiv
e
immedia
tely
Settin
g after
motor
stop
PST
P00
01
Direction of
rotation
0-CCW direction is the
forward direction
(counterclockwise)
1-CW direction is the
forward direction
(clockwise)
1 0
Re-
power
Settin
g after
motor
stop
PST
P00
02
Pulse output
positive
direction
definition
0-CCW direction is
forward direction
(the corresponding
motor rotation direction
when the pulse output
OA leads the OB)
1- CW direction is
forward direction
(reverse mode, OA lag
OB)
1 0
Re-
power
Settin
g after
motor
stop
PST
P00
03
Self-adjusting
mode
0-invalid
1-standard mode
2-positioning mode
1 0
Effectiv
e
immedia
tely
Settin
g after
motor
stop
PST
P00
04
Rigidity level
setting
0~31 1 11
Effectiv
e
immedia
tely
Set
when
runnin
g
PST
P00
05
Inertia ratio 0~3000 0.01 1.00
Effectiv
e
immedia
tely
Set
when
runnin
g
PST
P00
07
Maximum
speed of the
system
0~10000rpm 1rpm
6000rp
m
Effectiv
e
immedia
tely
Settin
g after
motor
stop
PST
P00
08
System
maximum
torque
0~500 (times to the rated
torque of motor)
0.01 3.00
Effectiv
e
immedia
tely
Settin
g after
motor
stop
PST
P00
10
Servo OFF stop
mode
0-Free running stop, keep
free
1-zero speed stop, keep
free
1 0
Effectiv
e
immedia
tely
Settin
g after
motor
stop
PST
P00
11
Reserved
parameter
0~65535
1 0 N/A
Reser
ved
param
eter
PST
P00
12
Fault No.2 stop
mode selection
0-Free running stop, keep
free
1-zero speed stop, keep
free
1 0
Effectiv
e
immedia
tely
Settin
g after
motor
stop
PST

 Loading...
Loading...