5.9 Adjustments
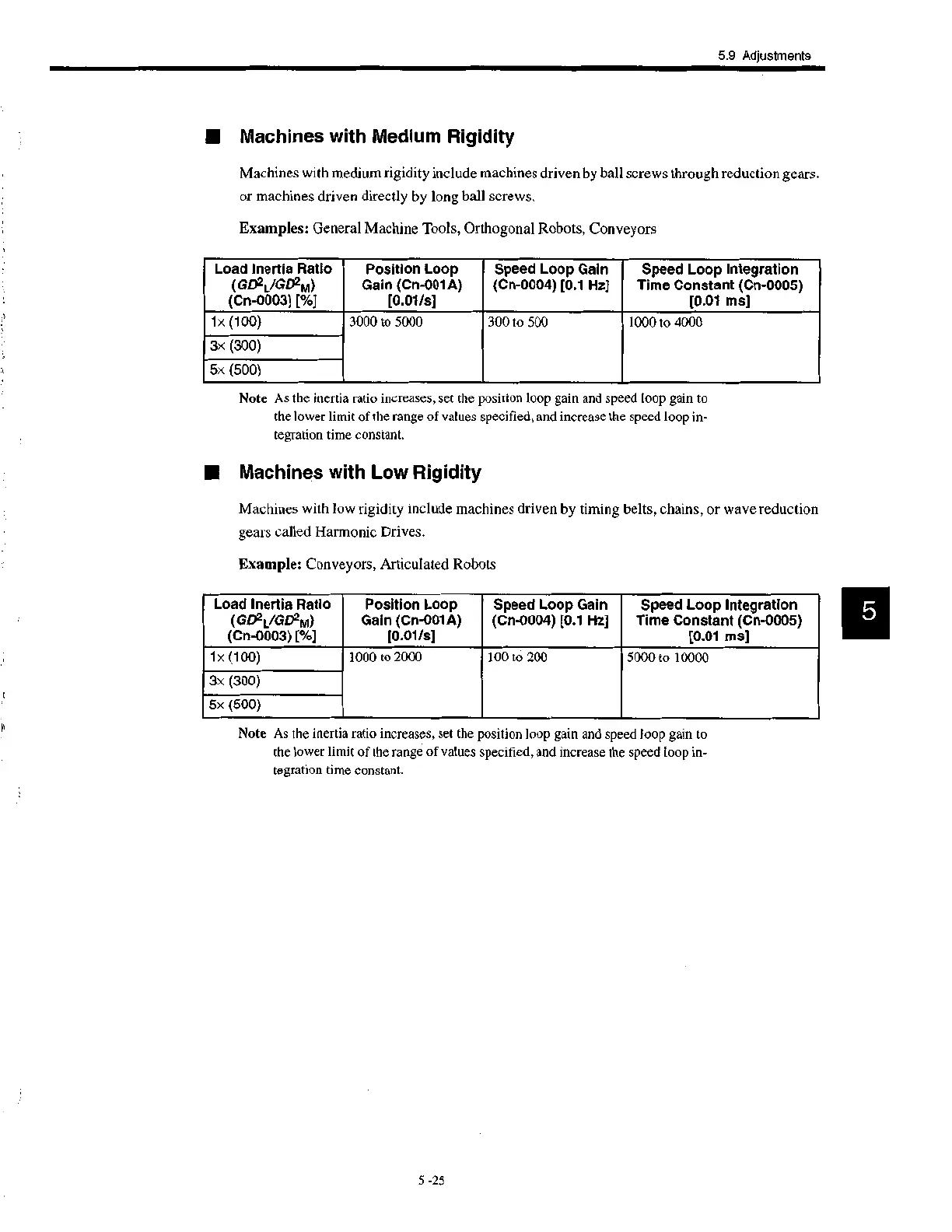
Load Inertia Ratio
(GD2L/GD2M)
(Cn-0003) [%]
Position Loop
Gain (Cn-001A)
[0.01/s]
Speed Loop Gain
(Cn-0004) [0.1 Hz]
Speed Loop Integration
Time Constant (Cn-0005)
[0.01 ms]
lx (100)
3000 to 5000
300 to 500 1000 to 4000
3x (300)
5x (500)
Load Inertia Ratio
(GD2L/GD2M)
(Cn-0003) [%]
Position Loop
Gain (Cn-001A)
[0.01/s]
Speed Loop Gain
(Cn-0004) [0.1 Hz]
Speed Loop Integration
Time Constant (Cn-0005)
[0.01 ms]
lx (100) 1000 to 2000
100 to 200 5000 to 10000
3x (300)
5x (500)
II Machines with Medium Rigidity
Machines with medium rigidity include machines driven by ball screws through reduction gears.
or machines driven directly by long ball screws.
Examples: General Machine Tools, Orthogonal Robots, Conveyors
Note As the inertia ratio increases, set the position loop gain and speed loop gain to
the lower limit of the range of values specified, and increase the speed loop in-
tegration time constant.
II Machines with Low Rigidity
Machines with low rigidity include machines driven by timing belts, chains, or wave reduction
gears called Harmonic Drives.
Example: Conveyors, Articulated Robots
Note As the inertia ratio increases, set the position loop gain and speed loop gain to
the lower limit of the range of values specified, and increase the speed loop in-
tegration time constant.
 Loading...
Loading...







