4 Repair
4.6.4. Replacement of motor, axis 3, IRB 1600ID
3HAC026660-001 Revision: C190
© Copyright 2006-2008 ABB. All rights reserved.
Removal, motor axis 3
Action Note
1.
DANGER!
Turn off all electric power,
hydraulic and pneumatic
pressure supplies to the robot!
2. In order to release the brakes,
connect the 24 VDC power
supply to the motor.
Connect to connector R3.MP3:
•+: pin 7
• -: pin 8
3. Remove any additional
mechanical stops from axis 3.
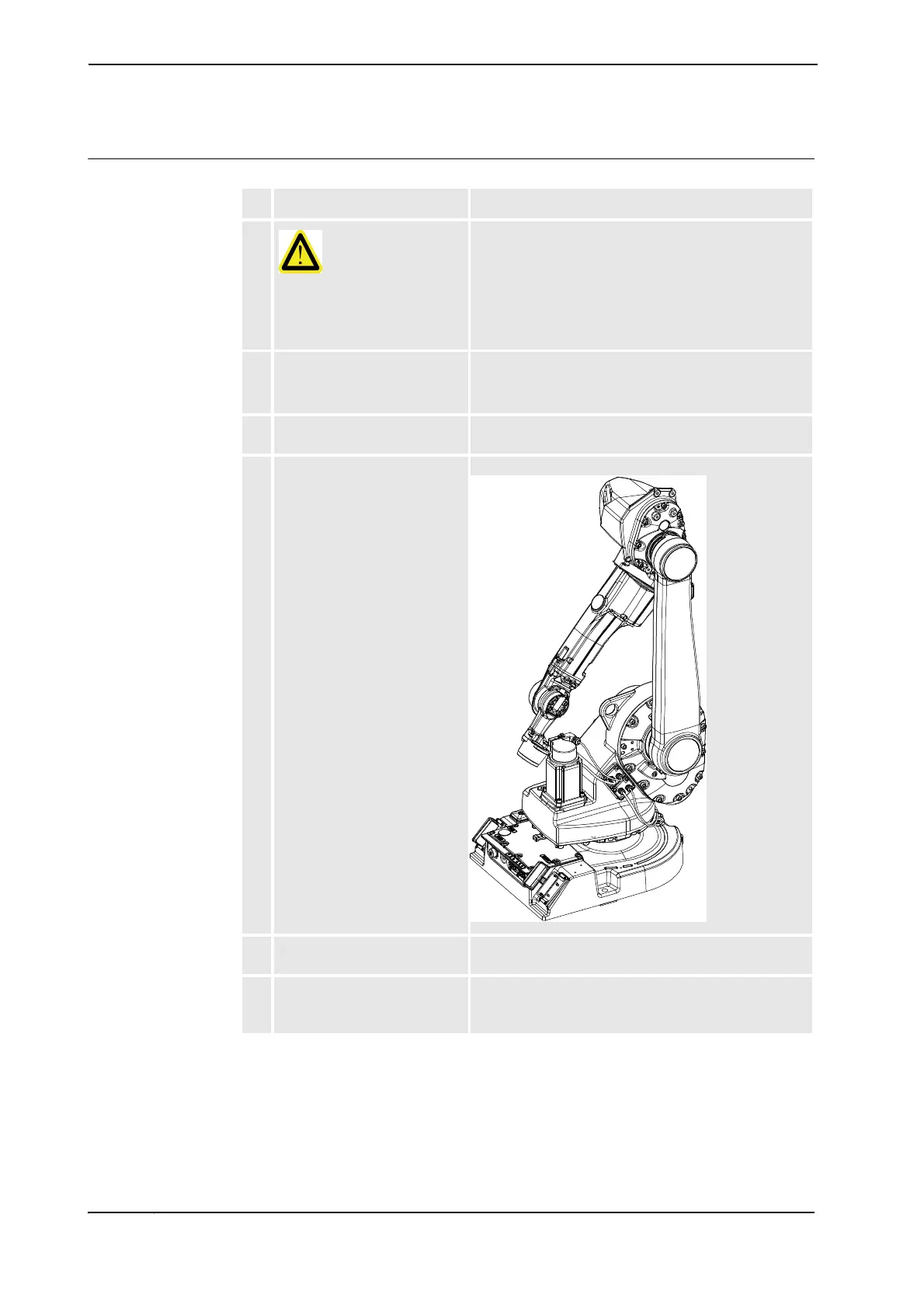
4. Move:
• axis 2 to calibration
position
• upper arm backwards
against the mechanical
stop
This position enables removal
of the motor without draining
oil of the gearbox, axis 3.
xx0700000010
5. Remove the upper arm
housing cover.
Shown in the figure Location of motor on page 189
6. Disconnect the motor
connectors R3.MP3 and
R3.FB3.
Shown in the figure Location of motor on page 189
Continued
Continues on next page

 Loading...
Loading...






