4 Repair
4.6.4. Replacement of motor, axis 3, IRB 1600ID
1893HAC026660-001 Revision: C
© Copyright 2006-2008 ABB. All rights reserved.
4.6.4. Replacement of motor, axis 3, IRB 1600ID
NOTE!
After replacement of motors/motor in a manipulator, recalibration is required.
Location of motor
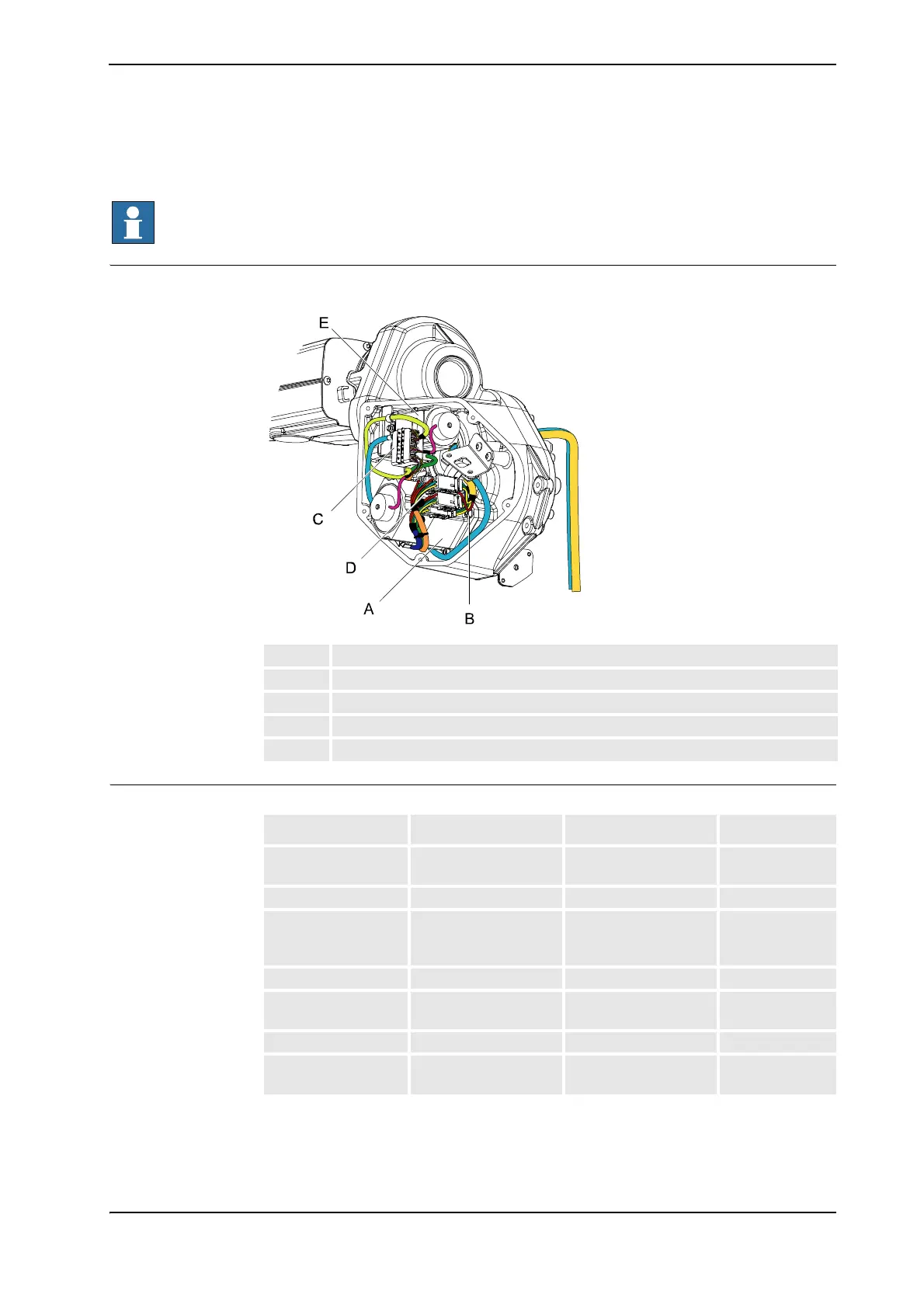
The motor of axis 3 is located inside the upper arm housing, as shown in the figure below.
xx0700000008
Required equipment
A Motor, axis 3
B Attachment screws and washers of the motor (4 pcs)
C Signal connector R3.FB3
D Power connector R3.MP3
E Connector holder
Equipment Spare part no. Art.no. Note
Rot. ac motor incl
pinion
3HAC 021798-001
O-ring 3HAB3772-100
Isopropanol Used for cleaning
the mating
surfaces.
Grease
Standard tools Contents,
standard toolkit
Circuit diagram
Pendulum Calibration
tool
Continues on next page

 Loading...
Loading...






