2TLC172287M0201 Rev B 10 www.abb.com/jokabsafety
2015-09-17
b) S
RO
= (K × T) + C
RO
K and T according to a).
C
RO
= Intrusion distance when reaching over the AOPD towards the hazard zone prior to the actuation of the
AOPD. This value depends on the height of the hazard zone and the height of the uppermost beam,
see EN ISO 13855:2010.
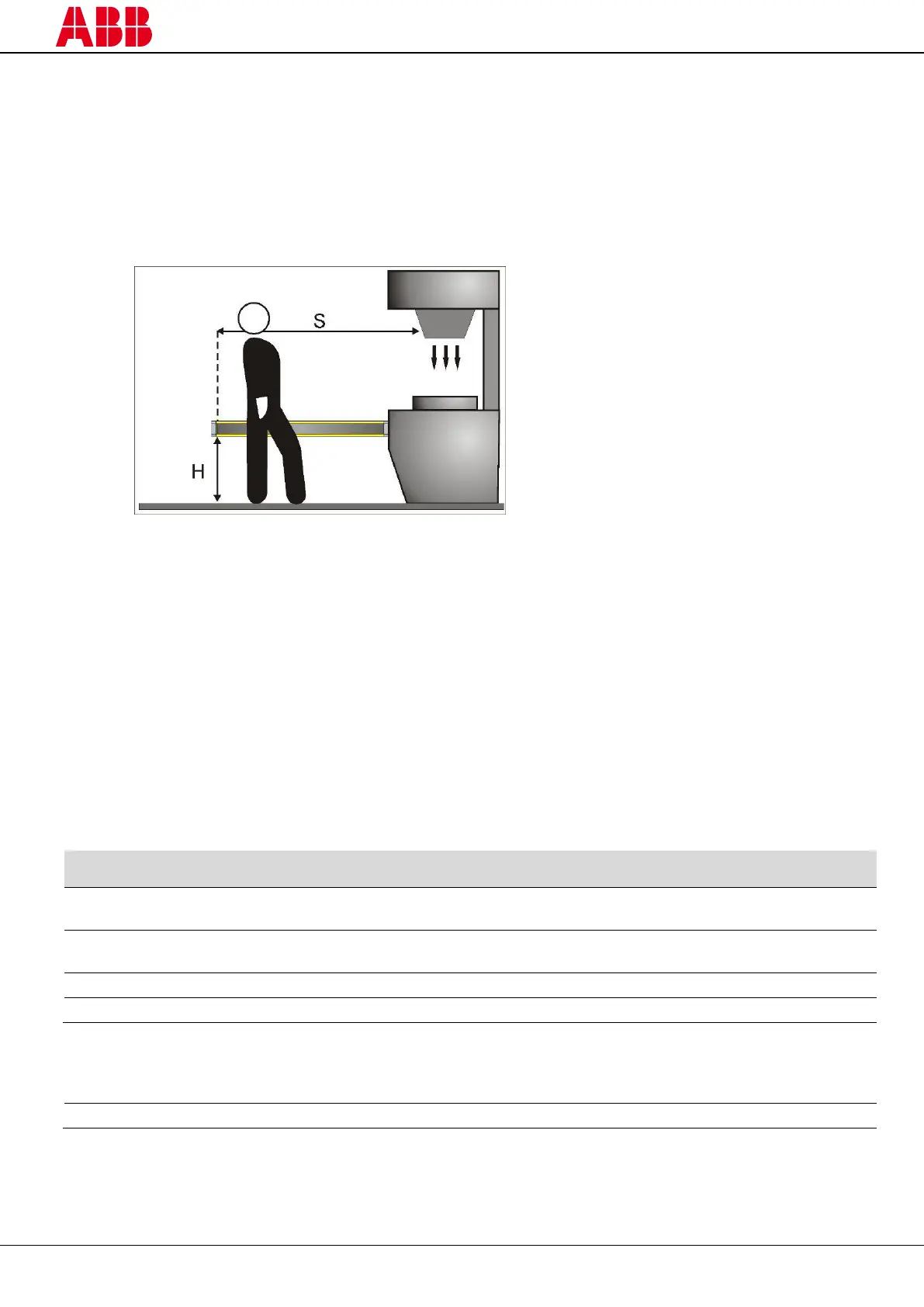
2.4.2 Horizontally assembled AOPD
In this case, S is the minimum distance from the hazardous machinery to the farthermost beam:
Figure 4 – Minimum distance for a horizontally assembled AOPD
S = minimum distance in mm
H = height of the detection zone.
See below for calculation
S = (K × T) + C
K = 1600 mm/s.
C = 1200 - 0.4 × H, where H is the height of the detection zone in mm. S Shall not be less than 850 mm.
The minimum allowed height of the detection zone above the reference plane is calculated using H = 15 × (d - 50),
where d is the resolution. H shall not be less than 0 or greater than 1000.
2.4.3 Angled assembled AOPD
See the latest version of EN ISO 13855.
2.4.4 Practical examples
Let's suppose we have an Orion1-4-xx-060 in a vertical position and with no risk of reaching over it.
S = K × (T1 + T2) + 8 × (d -14)
T1, response time of AOPD
(see paragraph 12 – “Model overview”)
T2, stopping time machine + safety control system
(value as ex.)
S
K=2000
, minimum distance with K = 2000 mm/s
In both cases, S is greater than 500 mm and can be recalculated with K = 1600 mm/s.
S
K=1600
, minimum distance with K = 1600 mm/s
S is still greater than 500 mm and therefore OK.