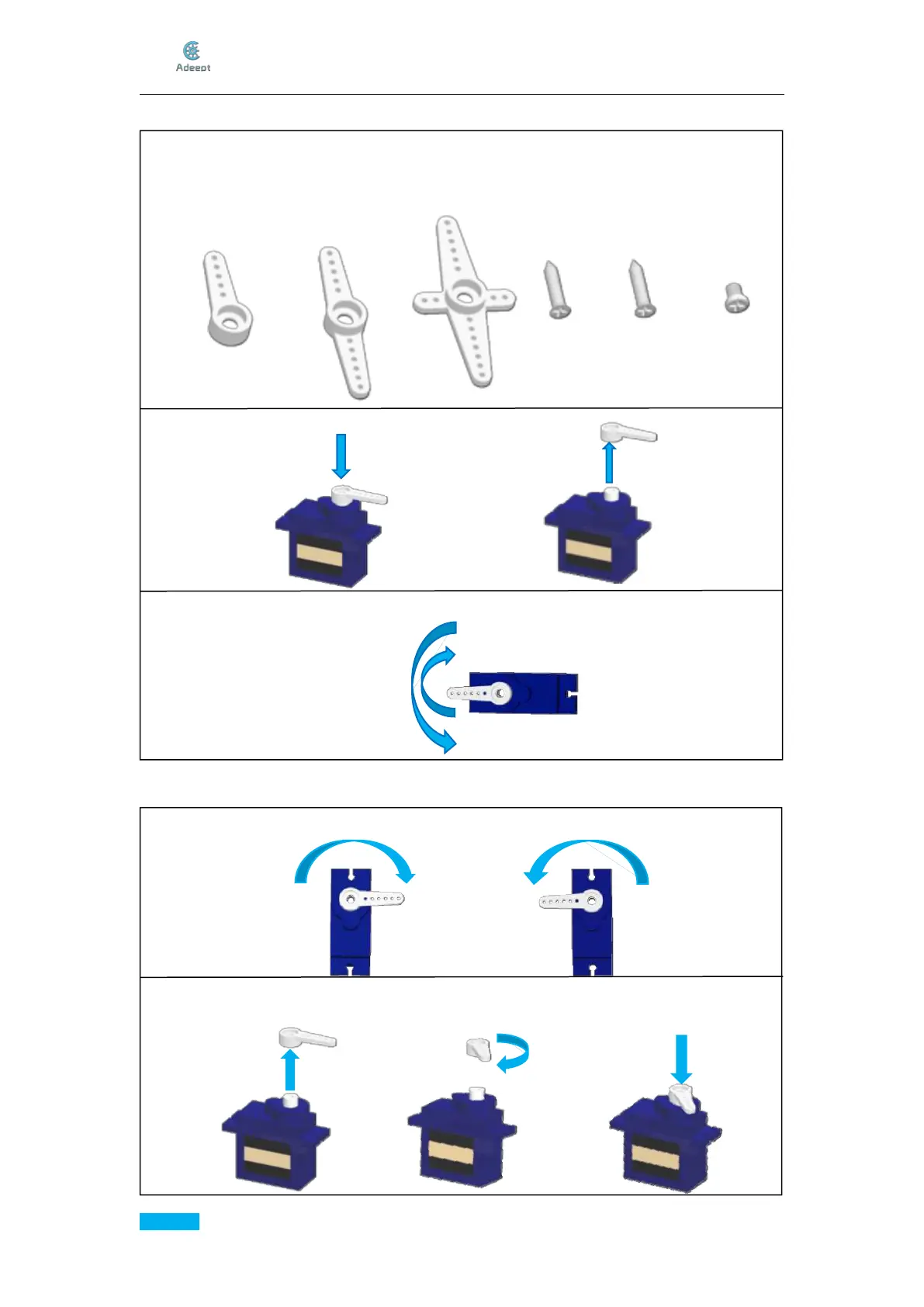
First, learn the structure. The servo can connect the rocker arm and spin to drive components
bound with the arm. There are 3 types of rocker arms and 3 screwsinthepackage.The
smallest one is to fix the arm onto the servo.
Mount and remove the rocker arm.
Rotate the rocker arm between 0 and 180 degrees.
Adjust the rocker arm to make it rotate to an almost equal angletowardsleftandright.
If the angle is not nearly the same, please remove the arm and install it again. Repeat the step until
nearly the SAME degree.
3. Calibrate the servos.
Now adjust the servo. This step is to make the servo shaft in themiddle,sothecomponent
connected to the servo can be driven to move in a certain scope as needed.