30
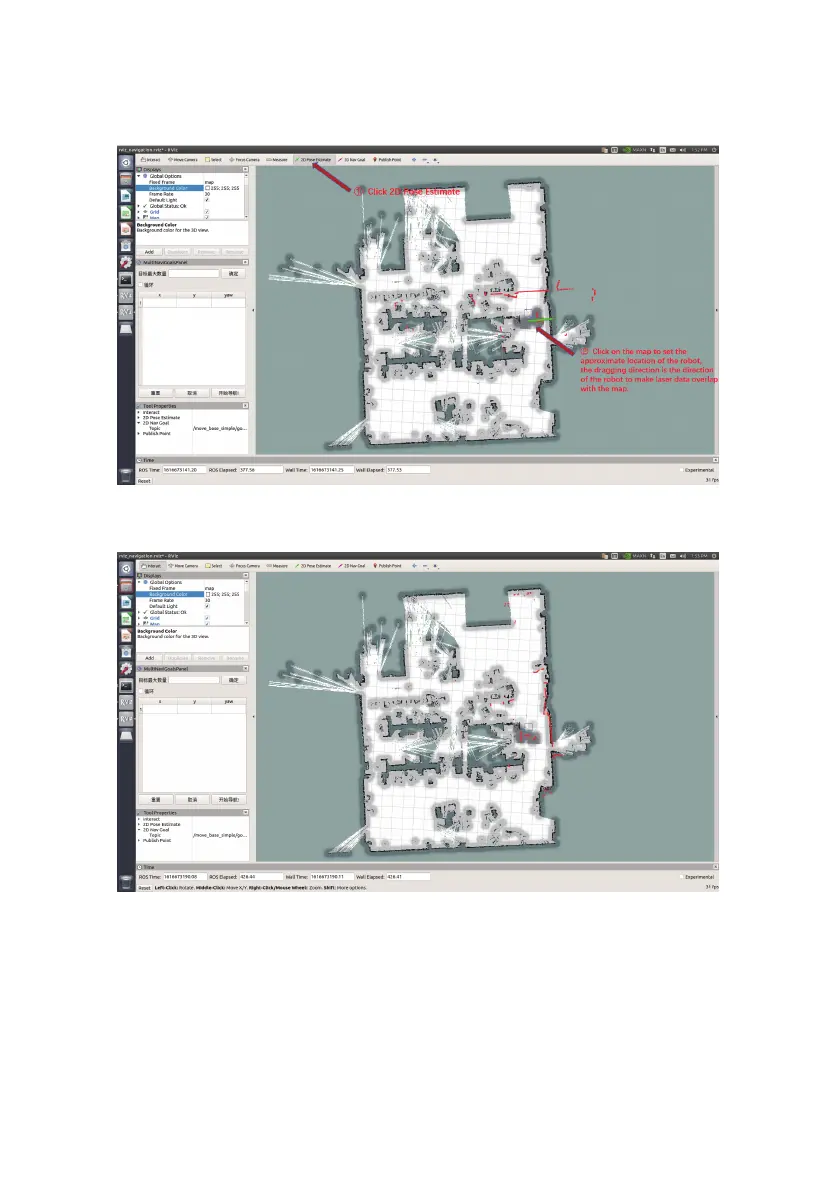
(3)Regulate the actual position of the robot on the map displayed in rviz, and regulate the chassis
rotation by publishing an approximate position with the handle. When the laser shape overlaps
with the scene shape in the map, the regulation is complete.
After setting the positioning, the laser shape and the scene shape in the map have basically
overlapped, the means the regulation is complete. As the picture shown below.