Rockwell Automation Publication 2080-UM002G-EN-E - March 2015 91
Motion Control Chapter 7
Axis Error Scenarios
In most cases, when a movement function block instruction issued to an axis
results in a function block error, the axis is also usually flagged as being in Error
state. The corresponding ErrorID element is set on the axis_ref data for the axis.
However, there are exception scenarios where an axis error is not flagged. The
exception can be, but not limited to, the following scenarios:
• A movement function block instructs an axis, but the axis is in a state
where the function block could not be executed properly. For example, the
axis has no power, or is in Homing sequence, or in Error Stop state.
• A movement function block instructs an axis, but the axis is still controlled
by another movement function block. The axis cannot allow the motion to
be controlled by the new function block without going to a full stop. For
example, the new function block commands the axis to change motion
direction.
• When one movement function block tries to control an axis, but the axis is
still controlled by another movement function block, and the
newly-defined motion profile cannot be realized by the controller. For
example, User Application issues an S-Curve MC_MoveAbsolute function
block to an axis with too short a distance given when the axis is moving.
• When one movement function block is issued to an axis, and the axis is in
the Stopping or Error Stopping sequence.
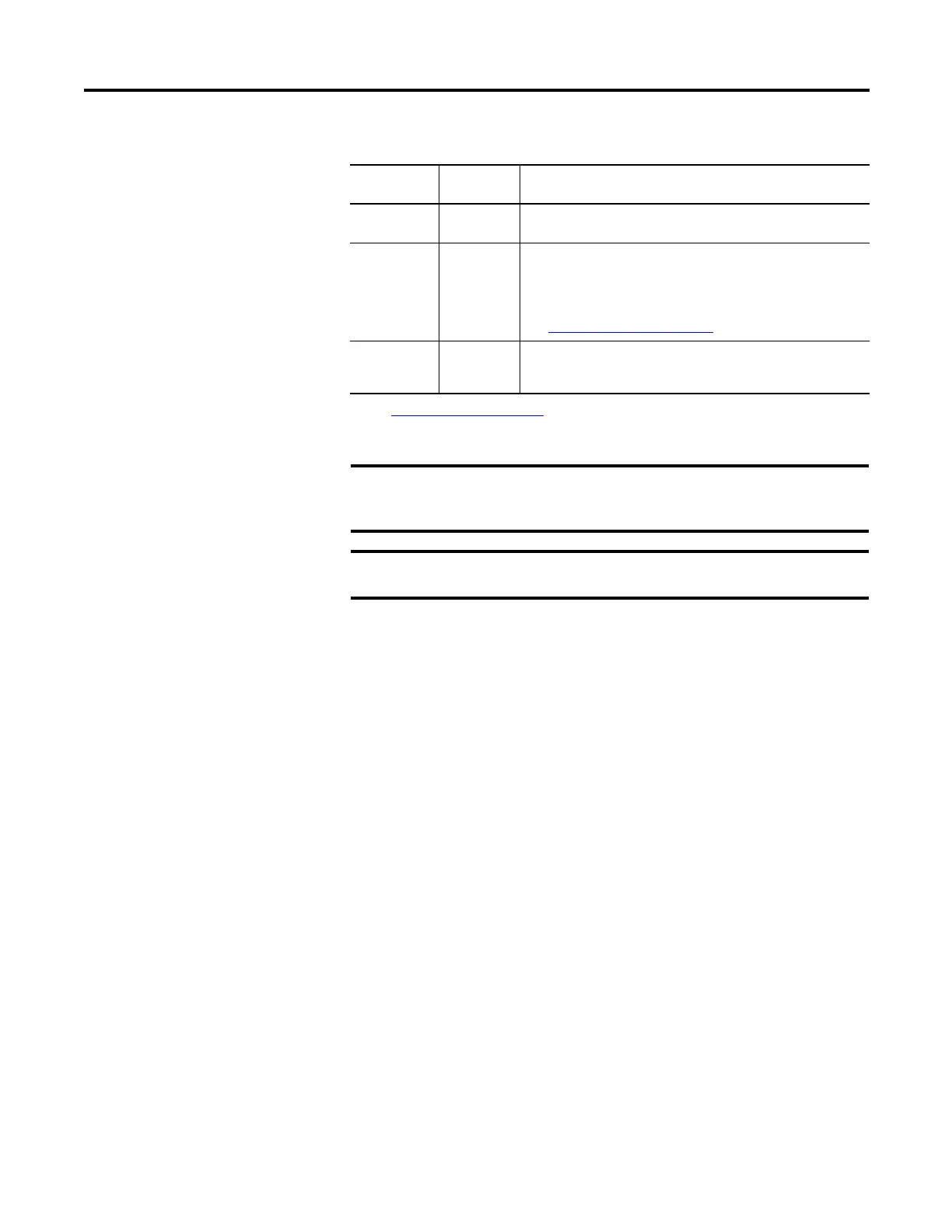
CommandPos REAL
(float)
(1)
On a moving axis, this is the current position the controller
commands the axis to go to.
TargetVel REAL
(float)
(1)
The maximum target velocity issued to the axis by a move function
block. The value of TargetVel is same as the velocity setting in
current function block, or smaller, depending on other parameters
in the same function block. This element is a signed value
indicating direction information.
See PTO Pulse Accuracy on page 106 for more information.
CommandVel REAL
(float)
(1)
During motion, this element refers to the velocity the controller
commands the axis to use. This element is a signed value
indicating direction information.
(1)
See Real Data Resolution on page 104 for more information on REAL data conversion and rounding.
Once an axis is flagged with error, and the error ID is not zero, the user
needs to reset the axis (using MC_Reset) before issuing any other
movement function block.
The update for axis status is performed at the end of one program scan
cycle, and the update is aligned with the update of Motion Axis status.
Data Elements for Axis_Ref
Element
name
Data Type Description

 Loading...
Loading...







