238 Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
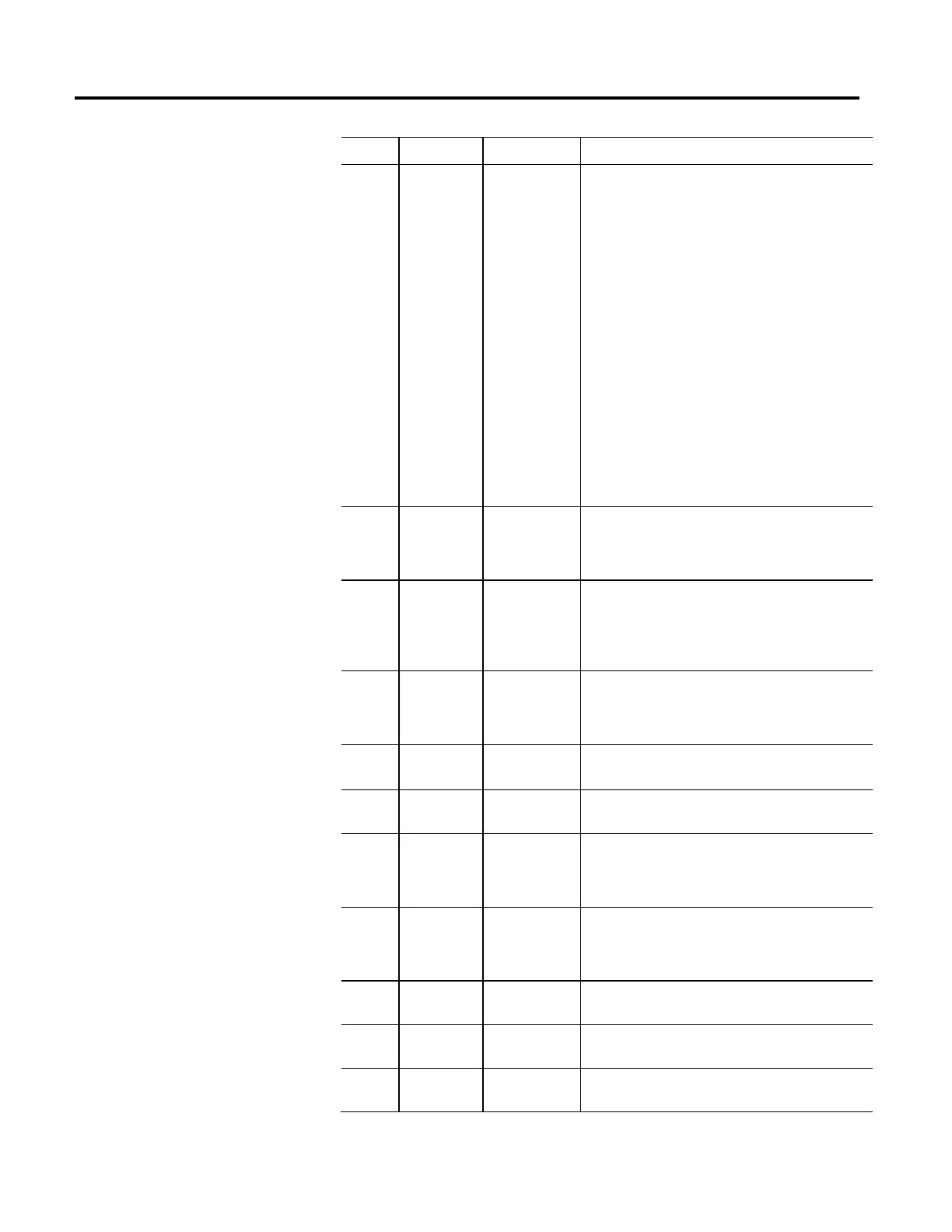
Bit Usage Status Condition Description
2 Required/ BD DC Bus Up
This bit is set for a drive axis if the DC Bus has charged up to an
operational voltage level based on direct measurement and, if
applicable, the Converter Bus Up Status bit associated with
external CIP Motion converter(s) supplying DC Bus power to this
device is also set.
If the drive's Bus Configuration attribute is set to
"Shared DC - Non CIP Converter" the drive may also check the
status of its associated external Non-CIP Motion converter. When
a drive axis is in the Pre-Charge state, the transition of the DC Bus
Up stat
us bit from 0 to 1 initiates a state transition to the Stopped
State. Once set, the DC Bus Up bit is cleared when the DC Bus
voltage has dropped below an operational voltage level, or the
Converter Bus Up Status bit associated with external CIP Motion
converter(s) supplying DC Bus power to this device is cleared.
For a converter axis, this bit is set if the DC Bus has charged up to
an operational voltage level based on direct measurement alone.
When a converter axis is in the Pre-Charge state, the transition of
the DC Bus Up status bit from 0 to 1 initiates a state transition to
the Running state. Once set, the DC Bus Up bit is cleared when the
DC Bus voltage has dropped below an operational voltage level,
independent of the state of the Converter Bus Up Status bit.
3 Required/
D
Power Structure
Enabled
This bit is set if the axis amplifier is energized and capable of
generating motor flux and torque. The value of the Power
Structure Enabled bit is determined by the Axis State and the
configured Stopping Action attribute value.
4 Required/
D
Motor Flux Up
This bit is set if motor flux for an induction motor has reached an
operational level. Transition of the Motor Flux Up bit is initiated in
the Starting State according to the configured Flux Up Control
attribute value. This bit is only applicable to Induction Motor
types.
5 Required/
D
Tracking Command
This bit is set if the axis control structure is actively tracking the
command reference from the motion planner. The Tracking
Command bit is directly associated with the Running state of the
Axis State Model.
6 Required/
P
Position Lock
This bit is set if the actual position is within the Position Lock
Tolerance of the command position.
7 Optional/
PV
Velocity Lock
This bit is set if the velocity feedback signal is within the Velocity
Lock Tolerance of the unlimited velocity reference.
8 Required/
ED
Velocity Standstill
This bit is set if the velocity feedback signal is within Velocity
Standstill Window of 0. For a Frequency Control drive this bit is
set if the velocity reference signal is within Velocity Standstill
Window of 0.
9 Optional/
ED
Velocity Threshold
This bit is set if the absolute velocity feedback signal is below
Velocity Threshold. For a Frequency Control drive this bit is set if
the absolute velocity reference signal is below the Velocity
Threshold.
10 Optional/
FPV
Velocity Limit
This bit is set if the velocity reference signal is currently being
limited by the Velocity Limiter.
11 Optional/
C
Acceleration Limit
This bit is set if the a
cceleration reference signal is currently being
limited by the Acceleration Limiter.
12 Optional/
C
Deceleration Limit
This bit is set if the acceleration reference signal is currently being
limited by the Deceleration Limiter.

 Loading...
Loading...






