122 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Structured Text
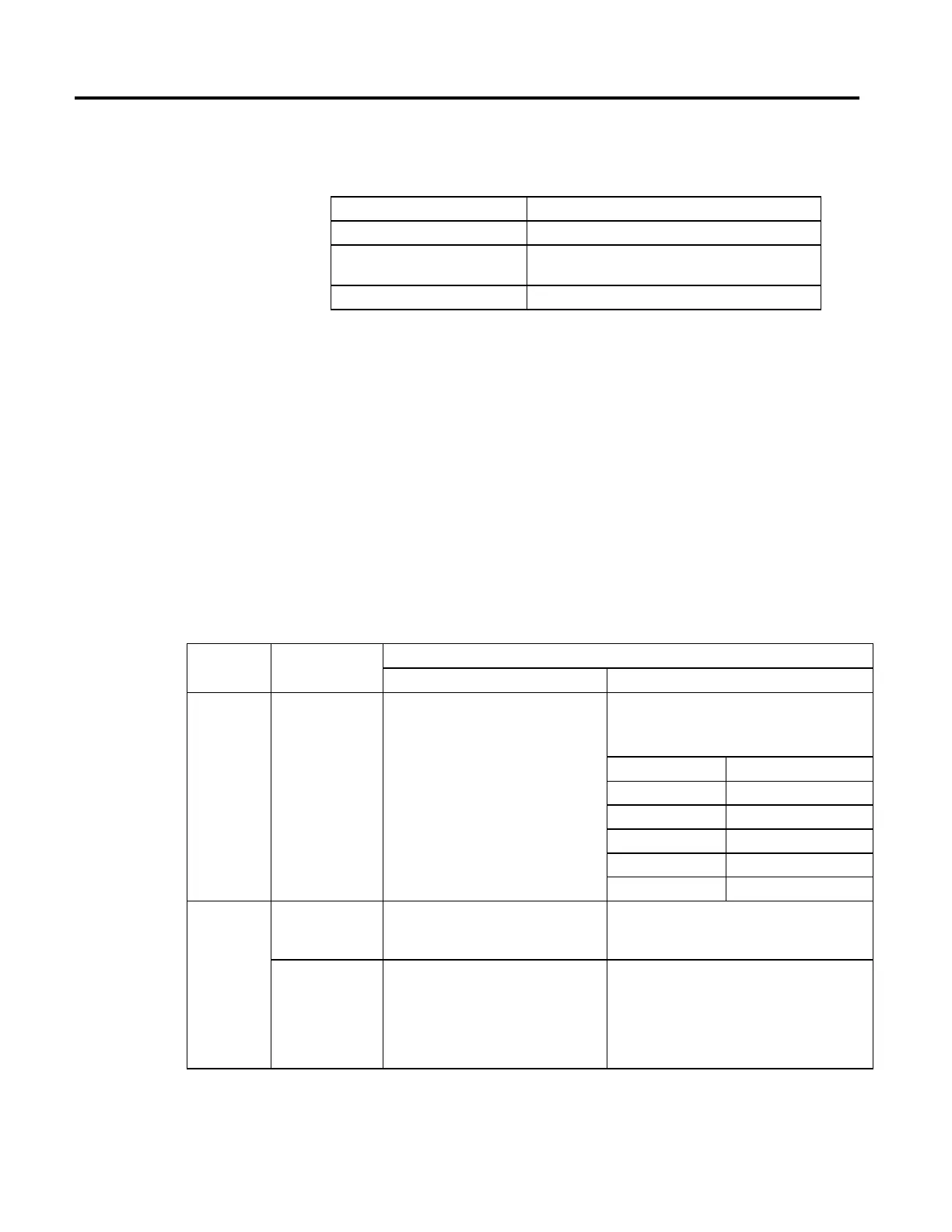
Condition/State Action Taken
Prescan See Prescan in the Ladder Diagram table
Normal execution See Rung-condition-in is false, followed by rung is true in the
Ladder Diagram table.
Postscan See Postscan in the Ladder Diagram table.
Error Codes
See Error Codes (.ERR) for Motion Instructions.
Runtime Error Condition
The slave move must start at rest if Speed Units = Seconds or Master Units. This
condition may occur when the MAM with Speed = Seconds or Master Units is
started while another MAM is in progress (merging or replacement mode).
Extended Error Codes
Use Extended Error Codes (EXERR) for more instruction about an error. See
Error Codes (.ERR) for Motion Instructions.
If ERR is And EXERR is
Then
Cause Corrective Action
13 Varies An operand is outside its range. The EXERR is the number of the operand that is out of
range. The first operand is 0.
For example, if EXERR = 4, then check the Speed.
EXERR Operand
0 Axis
1 Motion Control
2 Move Type
3 Position
4 Speed
15 -1 The coordinate system has a Maximum
Deceleration of 0.
Go to the Properties for the coordinate system axis and set a
Maximum Deceleration.
0 or more An axis in the coordinate system has a Maximum
Deceleration of 0.
1. Open the Properties for the axis.
2. Use the EXERR value to see which axis has the Maximum
Deceleration of 0.
3. The axis that you are moving via the MAM instruction
has a deceleration rate of 0.
 Loading...
Loading...







