Home
Allen-Bradley
Controller
Studio 5000 Logix Emulate
Allen-Bradley Studio 5000 Logix Emulate
676 pages
Manual
To Next Page
To Next Page
To Previous Page
To Previous Page
Loading...
Chapter 2
Motion Move In
structions
146
Rockwell Auto
mation Publicatio
n MOTION
-
RM002H
-
EN
-P-
Febru
ary 2018
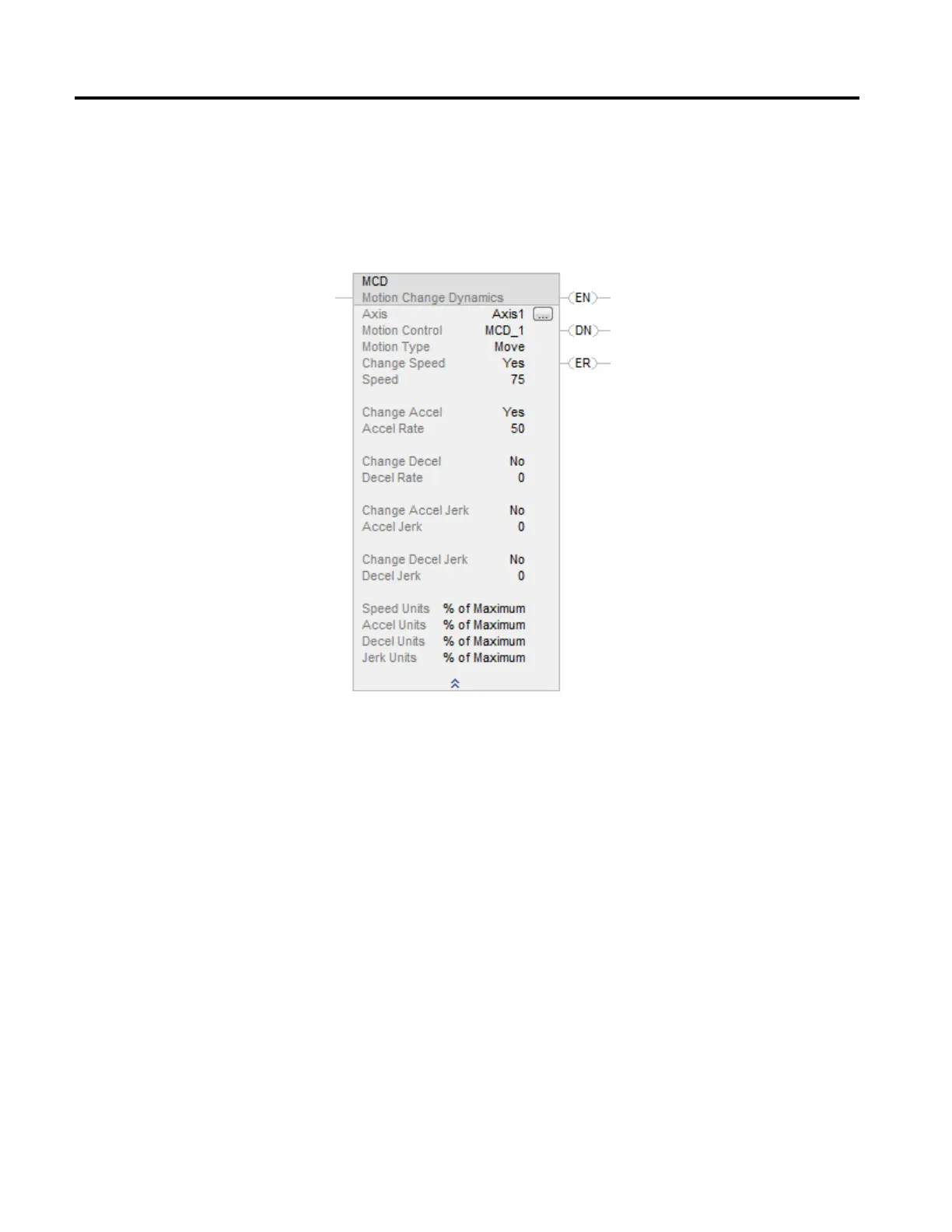
Examples
Example 1
Ladder Diagr
am
Structured
Text
MCD(Axis1,M
CD_1,Move,Yes,75
,Yes,50,N
o,0,No,0,No,0
,%ofMaximum
,%ofM
aximum,%of
Maximum,
%ofMaximu
m);
145
147
Table of Contents
Main Page
Default Chapter
9
Table of Contents
9
Preface
15
Studio 5000 Environment
15
Additional Resources
16
Legal Notices
16
Immediate Type Instructions
23
Understand Instruction Timing
23
Message Type Instructions
24
Process Type Instructions
25
Write a Motion Application Program
27
Motion State Instructions
29
Chapter 1 Motion State Instructions ................................................................................................ 29
35
Motion Axis Fault Reset (MAFR)
35
MAFR Flow Chart (True)
39
Motion Axis Shutdown (MASD)
40
MASD Flow Chart (True)
45
Motion Axis Shutdown Reset (MASR)
45
MASR Flow Chart (True)
50
Motion Direct Drive off (MDF)
51
MDF Flow Chart (True)
55
Motion Direct Drive on (MDO)
56
MDO Flow Chart (True)
62
Motion Drive Start (MDS)
63
Motion Servo off (MSF)
71
MSF Flow Chart (True)
76
Motion Servo on (MSO)
77
MSO Flow Chart (True)
81
Motion Move Instructions
83
Chapter 2 Motion Move Instructions ............................................................................................... 83
84
Motion Axis Stop (MAS)
84
Motion Axis Home (MAH)
93
MAH Flow Chart (True)
100
Motion Axis Jog (MAJ)
101
Motion Axis Move (MAM)
112
Motion Axis Gear (MAG)
125
MAG Flow Chart (True)
137
Motion Change Dynamics (MCD)
138
MCD Flow Chart (True)
148
Motion Redefine Position (MRP)
149
MRP Flow Chart (True)
155
Motion Calculate Cam Profile (MCCP)
156
Motion Calculate Slave Values (MCSV)
163
Motion Axis Position Cam (MAPC)
166
MAPC Flow Chart (True)
190
Motion Axis Time Cam (MATC)
191
MATC Flow Chart (True)
209
Chapter 3 Motion Group Instructions
211
Motion Group Stop (MGS)
212
MGS Flow Chart (True)
219
Motion Group Shutdown (MGSD)
220
MGSD Flow Chart (True)
225
Motion Group Shutdown Reset (MGSR)
226
MGSR Flow Chart (True)
229
Motion Group Strobe Position (MGSP)
230
MGSP Flow Chart (True)
233
Chapter 4 Motion Event Instructions
235
Motion Arm Watch (MAW)
236
MAW Flow Chart (True)
242
Understand a Programming Example
243
Motion Disarm Watch (MDW)
243
MDW Flow Chart (True)
248
Motion Arm Registration (MAR)
249
MAR Flow Chart (True)
257
Motion Disarm Registration (MDR)
258
Motion Arm Output Cam (MAOC)
262
Scheduled Output Module
282
Specifying the Output Cam
289
Specifying Output Compensation
293
MAOC Flow Chart (True)
297
Motion Disarm Output Cam (MDOC)
298
MDOC Flow Chart (True)
303
Chapter 5 Motion Configuration Instructions
305
Motion Apply Axis Tuning (MAAT)
306
MAAT Flow Chart (True)
313
Motion Run Axis Tuning (MRAT)
313
MRAT Flow Chart (True)
323
Motion Apply Hookup Diagnostics (MAHD)
324
MAHD Flow Chart (True)
329
Motion Run Hookup Diagnostics (MRHD)
330
Rockwell Automation Publication MOTION-RM002H-EN-P-February
330
MRHD Flow Chart (True)
343
Modify Motion Configuration Parameters
344
Multi-Axis Coordinated Multi-Axis Coordinated Motion Instructions
345
Motion Instructions Master Driven Coordinated Control (MDCC)
354
Chapter 6 Multi-Axis Coordinated Motion Instructions ........................................................... 345
361
Motion Calculate Transform Position (MCTP)
361
Motion Coordinated Transform with Orientation (MCTO)
367
Motion Coordinated Path Move (MCPM)
377
Motion Coordinated Change Dynamics (MCCD)
392
Motion Calculate Transform Position with Orientation (MCTPO)
406
Motion Coordinated Circular Move (MCCM)
414
Motion Coordinated Linear Move (MCLM)
437
Motion Coordinated Shutdown (MCSD)
458
Motion Coordinated Shutdown Reset (MCSR)
462
Motion Coordinated Stop (MCS)
465
Motion Coordinated Transform (MCT)
476
Speed, Acceleration, Deceleration, and Jerk Enumerations for Coordinated Motion
489
Returned Calculated Data Parameter for Coordinated System Motion Instruction
494
Status Bits for Motion Instructions (MCLM, MCCM) When MDCC Is Active
496
Change between Master Driven and Time Driven Modes for Coordinated Motion Instructions
499
Choose a Termination Type
500
Common Action Table for Slave Coordinate System and Master Axis
509
Input and Output Parameters Structure for Coordinate System Motion Instructions
511
Returned Calculated Data Parameter for Coordinated System Motion Instruction
519
MDSC Functionality
521
Chapter 7 Master Driven Axis Control (MDAC) ....................................................................... 521
529
Changing between Master Driven and Time Driven Modes for Single Axis Motion Instructions
529
Common Action Table for Slave and Master Axis
531
Input and Output Parameters Structure for Single Axis Motion Instructions
533
Speed, Acceleration, Deceleration, and Jerk Enumerations
538
Time Based Planning
546
Active
550
Program a Velocity Profile Definition of Jerk
551
And Jerk Rate and Tune an Choose a Profile
551
Chapter 8 Definition of Jerk ............................................................................................................. 551 Choose a Profile ................................................................................................................ 551
553
Velocity Profile Effects
553
Tune an S-Curve Profile
553
Motion Error Codes, Faults, and Attributes
557
Chapter 9 Motion Error Codes (.ERR) .......................................................................................... 557
568
Handle Motion Faults
568
Motion Attributes
569
Understand Motion Status and Configuration Parameters
608
Troubleshoot Axis Motion
608
Chapter 10
627
CAM Structure
627
MOTION_GROUP Structure
628
MOTION_INSTRUCTION Data Type
630
OUTPUT_CAM Structure
632
OUTPUT_COMPENSATION Structure
633
Overview of Motion-Related Data Types
627
Chapter 11
635
Structured Text Syntax
635
Structured Text Components: Assignments
636
Structured Text Components: Expressions
638
Use Arithmetic Operators and Functions
640
Use Relational Operators
641
Use Logical Operators
642
Use Bitwise Operators
643
Determine the Order of Execution
644
Structured Text Components: Instructions
644
Structured Text Components: Constructs
645
Character String Literals
646
If_Then
648
Case_Of
651
For_Do
653
While_Do
655
Repeat_Until
658
Structured Text Components: Comments
660
Rockwell Automation Publication MOTION-RM002H-EN-P-February
661
Overview of Structured Text Programming
635
Common Attributes for Motion Instructions
663
Chapter 12 Common Attributes ........................................................................................................ 663 Index through Arrays ..................................................................................................... 663
664
Immediate Values
664
Floating Point Values
664
LINT Data Types
666
Data Types
667
Data Conversions
669
Math Status Flags
673
Other manuals for Allen-Bradley Studio 5000 Logix Emulate
Programming Manual
92 pages
User Manual
103 pages
Related product manuals
Allen-Bradley LOGIX 5000
561 pages
Allen-Bradley Logix 5000 Series
48 pages
Allen-Bradley SLC 500
294 pages
Allen-Bradley SLC 500 Series
694 pages
Allen-Bradley SmartGuard 600
240 pages
Allen-Bradley SoftLogix 5800
272 pages
Allen-Bradley SMC-3 150-CF147
4 pages
Allen-Bradley 2080-SERIALISOL
118 pages
Allen-Bradley SLC 500 1747-L20
154 pages
Allen-Bradley SLC 500 1747-L40
154 pages
PowerFlex 20-750-S1
302 pages
Allen-Bradley PowerFlex 525
244 pages
 Loading...
Loading...







