182 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
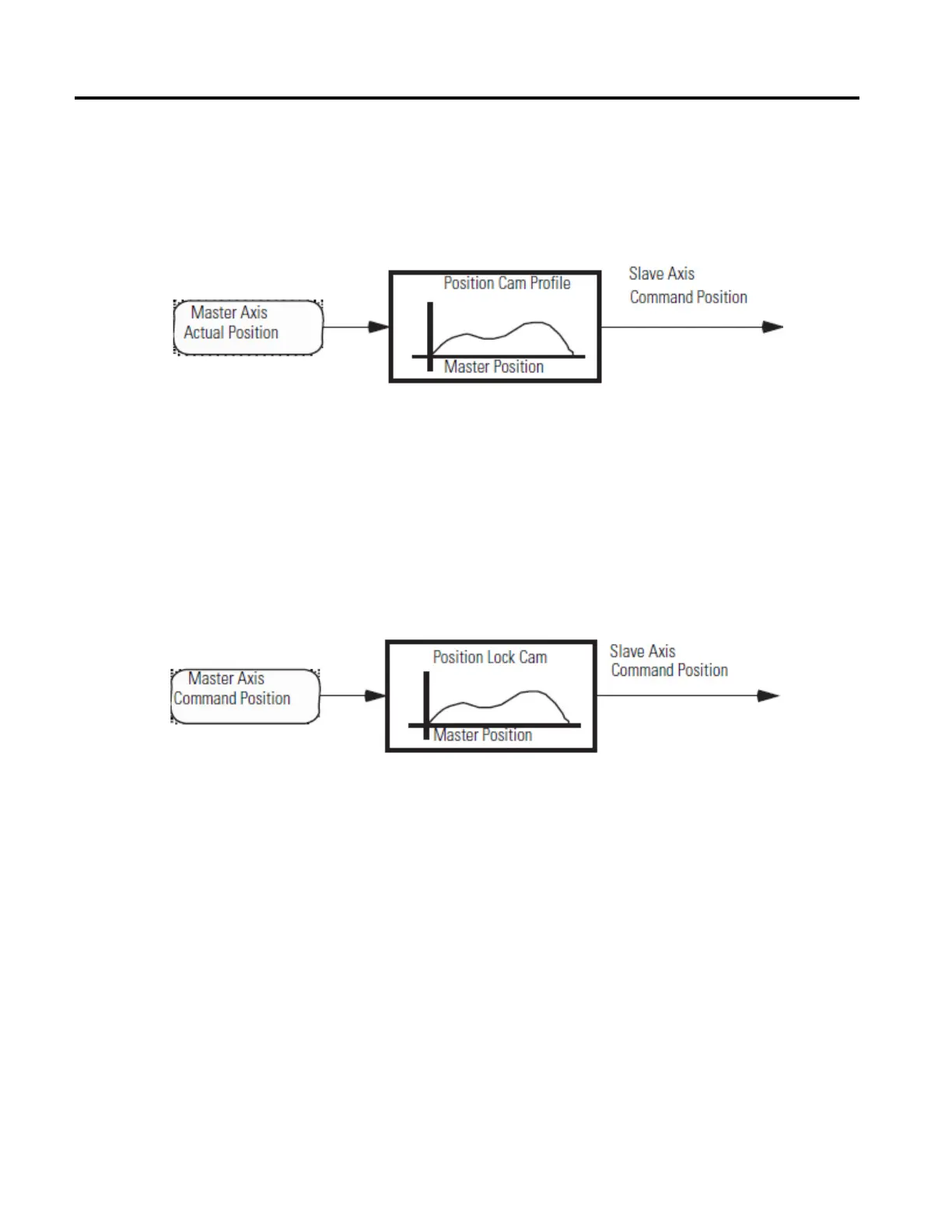
Slaving to the Actual Position
When Actual Position is entered or selected as the Master Reference source, the
slave axis motion is generated from the actual position of the master axis as shown
below.
Actual position is the current position of the master axis as measured by its
encoder or other feedback device. This is the default selection and the only
selection when the master Axis Type is configured as Feedback Only since it is
often necessary to synchronize the actual positions of two axes.
Slaving to the Command Position
When Command Position is entered or selected as the Master Reference source,
the slave axis motion is generated from the command position of the master axis as
shown below.
Command position (only available when the master axis’ Axis Type is a Servo or
Virtual axis) is the desired or commanded position of the master axis.
Since the command position does not incorporate any associated following error
or external position disturbances, it is a more accurate and stable reference for
camming. When camming to the command position of the master, the master axis
must be commanded to move to cause any motion on the slave axis.
Master Direction
Normally, the Master Direction parameter is set to Bi-directional (default).
However, when Forward Only is selected for Master Direction, the slave axis
tracks the master axis in the forward direction of the master axis. When Reverse
Only is selected, the slave axis tracks the master axis in the reverse direction of the
master axis. If the master axis changes direction, the slave axis does not reverse
direction, but stays where it was when the master reversed. This Uni-directional
feature of position cams is used to provide an electronic slip clutch, which prevents
 Loading...
Loading...







