Motion Event Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 245
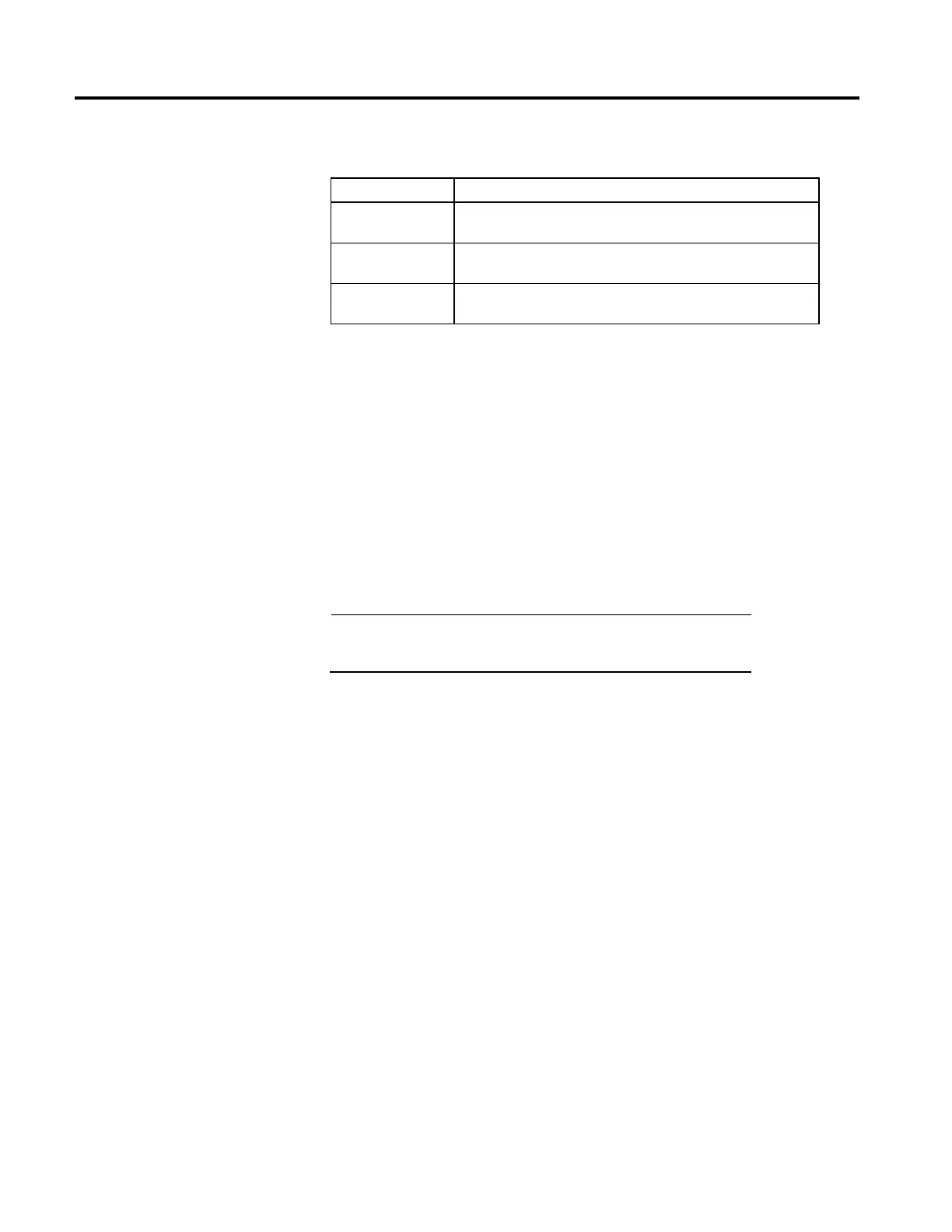
MOTION_INSTRUCTION Structure
Mnemonic Description
.EN (Enable) Bit 31 It is set to true when the rung makes a false-to-true transition and remains set to
true until the servo message transaction is completed and the rung goes false.
.DN (Done) Bit 29 It is set to true when the axis watch event checking has been successfully
disarmed.
.ER (Error) Bit 28 It is set to true to indicate that the instruction detected an error, such as if you
specified an unconfigured axis.
Description
The MDW instruction cancels watch position event checking set up by a previous
Motion Arm Watch (MAW). The Disarm Watch Position instruction requires
no parameters; simply enter or select the desired physical axis.
If the targeted axis does not appear in the list of available axes, the axis has not
been configured for operation. Use the Tag Editor to create and configure a new
axis.
To successfully execute a MDW instruction, the targeted axis must be configured
as either a Servo or Feedback Only axis. Otherwise, the instruction errs.
Important:
The instruction execution may take multiple scans to execute because it
requires multiple coarse updates to complete the request. The Done (.DN)
bit is not set immediately, but only after the request is completed.
In this transitional instruction, the relay ladder, toggle the Rung-condition-in
from cleared to set each time the instruction should execute.
Affects Math Status Flags
No
Major/Minor Faults
None specific to this instruction. See Common Attributes for operand-related
faults.
 Loading...
Loading...







