Motion Configuration Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 317
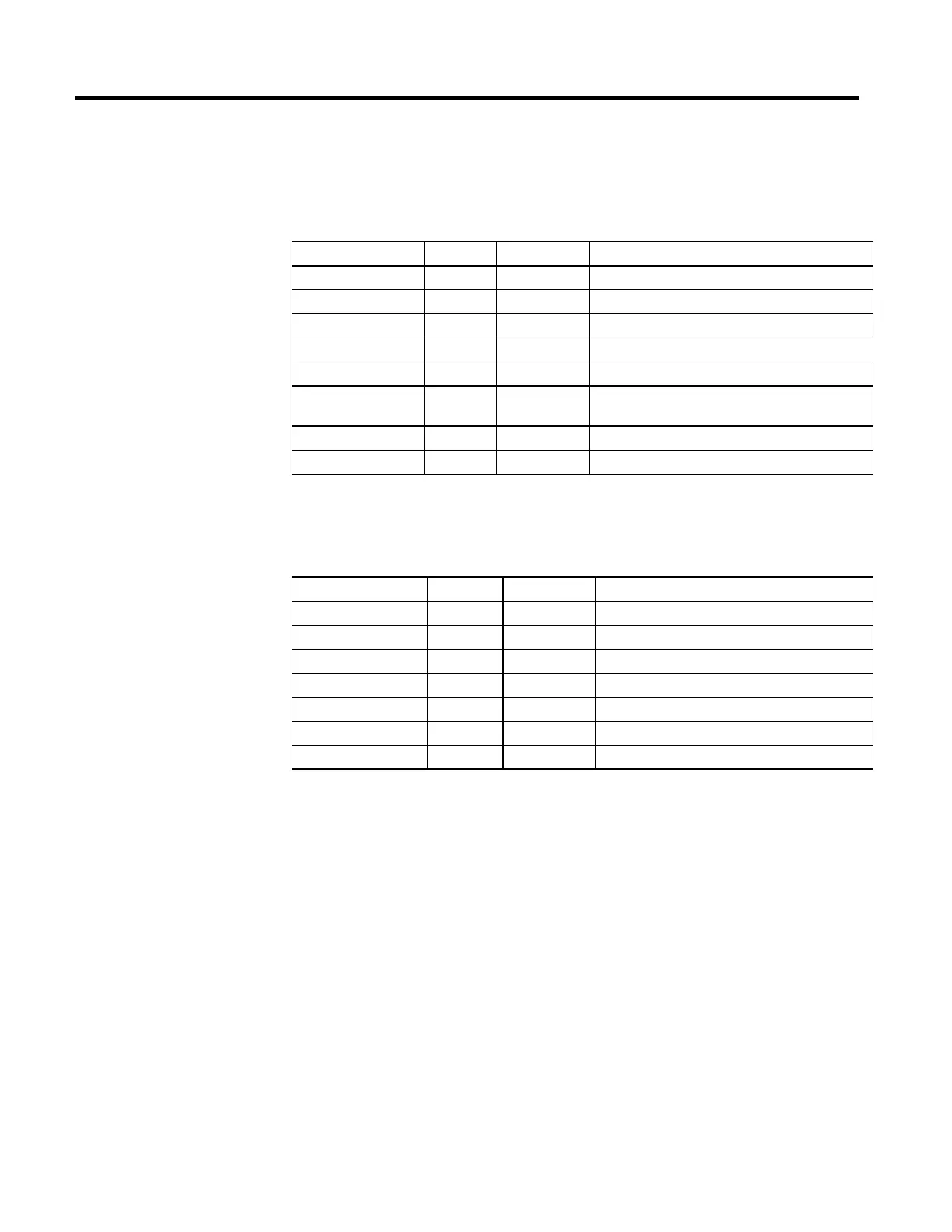
The axis configuration parameters that MRAT generates as output depend on the
External Drive configuration. If the External Vel Servo Drive configuration bit
parameter is TRUE, indicating interface to an external velocity servo drive, the
following output parameters are generated.
Axis Parameter Data Type Units Meaning
Tune Status Real - Status Report of the Tuning Process.
Tune Accel Time Real seconds Measured Acceleration Time of Tuning Profile.
Tune Decel Time Real seconds Measured Deceleration Time of Tuning Profile.
Tune Accel Real pos units/sec2 Calculated Acceleration Time of Tuning Profile.
Tune Decel Real pos units/sec2 Calculated Deceleration Time of Tuning Profile.
Tune Velocity Scaling Real mV/KCPS Measured Velocity Scaling factor of axis Drive/Motor/Encoder
system.
Tune Rise Time Real mV/KCPS Measured Rise Time of Tuning Step Response Profile.
Tune Velocity Bandwidth Real Hertz Computed Bandwidth of External Velocity Servo Drive
If the External Vel Servo Drive configuration bit parameter is FALSE, indicating
interface to an external torque servo drive, the following output parameters are
generated.
Axis Parameter Data Type Units Meaning
Tune Status Real - Status Report of the Tuning Process.
Tune Accel Time Real seconds Measured Acceleration Time of Tuning Profile.
Tune Decel Time Real seconds Measured Deceleration Time of Tuning Profile.
Tune Accel Real pos units/sec2 Calculated Acceleration Time of Tuning Profile.
Tune Decel Real pos units/sec2 Calculated Deceleration Time of Tuning Profile.
Effective Inertia Real mV/KCPS Computed Effective Inertia of Drive/Motor system.
Position Servo Bandwidth Real Hertz Calculated Maximum Position Servo Loop Bandwidth.
The above output parameters generated by the MRAT instruction serve as inputs
to a subsequent MAAT instruction which performs further tuning calculations
and applies the results to various axis’ servo and dynamic configuration
parameters.
 Loading...
Loading...







