Motion Configuration Instructions
318 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Description - AXIS_CIP_DRIVE
The MRAT instruction is used to execute a tuning motion profile on the specified
CIP axis. MRAT requires no explicit input parameters; simply enter or select the
desired physical axis.
If the targeted axis does not appear in the list of available axes, the axis has not
been configured for operation. Use the Tag Editor to create and configure a new
axis.
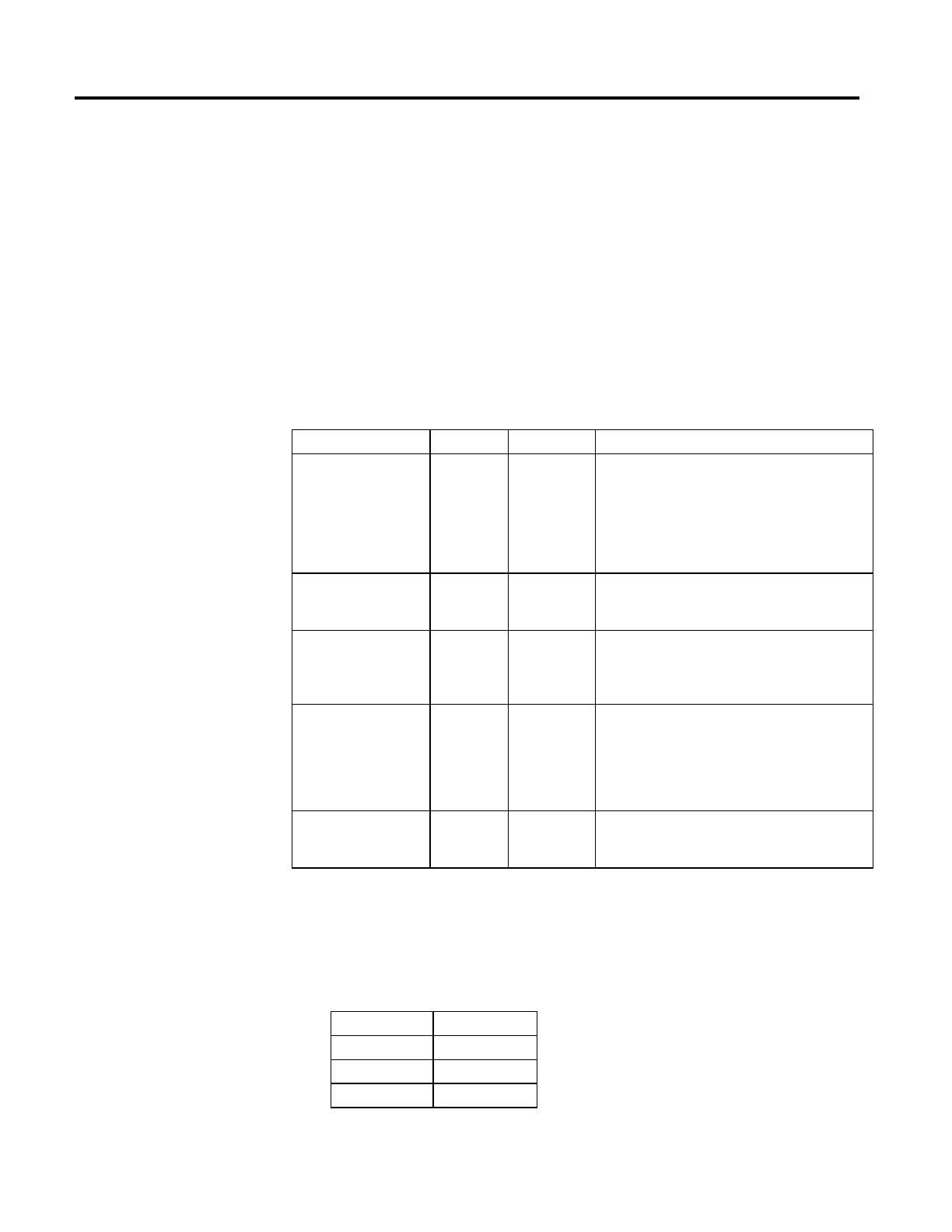
The MRAT instruction uses the CIP Axis configuration parameters as input and
output. The input configuration parameters that MRAT uses are shown in the
table below.
Axis Parameter Data Type Units Meaning
Tuning Direction Short Integer - It determines the direction of the motion profile initiated by
the Inertia Test service associated with the MRAT instruction.
0 = Unidirectional Forward
1 = Unidirectional Reverse
2 = Bi-Directional Forward
3 = Bi-Directional Reverse.
Tuning Travel Limit Real Position Units It is used by the Inertia Test service, associated with the
MRAT instruction, to limit the excursion of the axis during the
test.
Tune Speed Real Position Units/sec The Tuning Speed attribute value determines the maximum
speed used by the Inertia Test service initiated motion profile.
This attribute should be set to the desired maximum
operating speed of the motor prior to running the test.
Tuning Torque Real % Rated It determines the maximum torque used by the Inertia Test
service initiated motion profile. This attribute should be set to
the desired maximum safe torque level prior to running the
test. The default value is 100%, which yields the most
accurate measure of the acceleration and deceleration
capabilities of the system.
Damping Factor Real - It is used in calculating the maximum Position and Velocity
Servo Bandwidth values during execution of the MRAT
instruction.
The input configuration parameters can also be set using the Axis Properties -
Autotune dialog box.
The Loop Response selection is used by the software to determine the value for the
Damping Factor.
Loop Response Damping Factor
Low 1.5
Medium 1.0
High 0.8
 Loading...
Loading...







