Motion Configuration Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 319
Based on the above configuration parameters, MRAT execution generates a
motion event on the specified axis that consists of a triangular velocity profile. The
tuning procedure will measure maximum acceleration and deceleration rates based
on ramps to and from the Tuning Speed. Thus, the accuracy of the measured
acceleration and deceleration capability is reduced by tuning at a speed other than
the desired operating speed of the system.
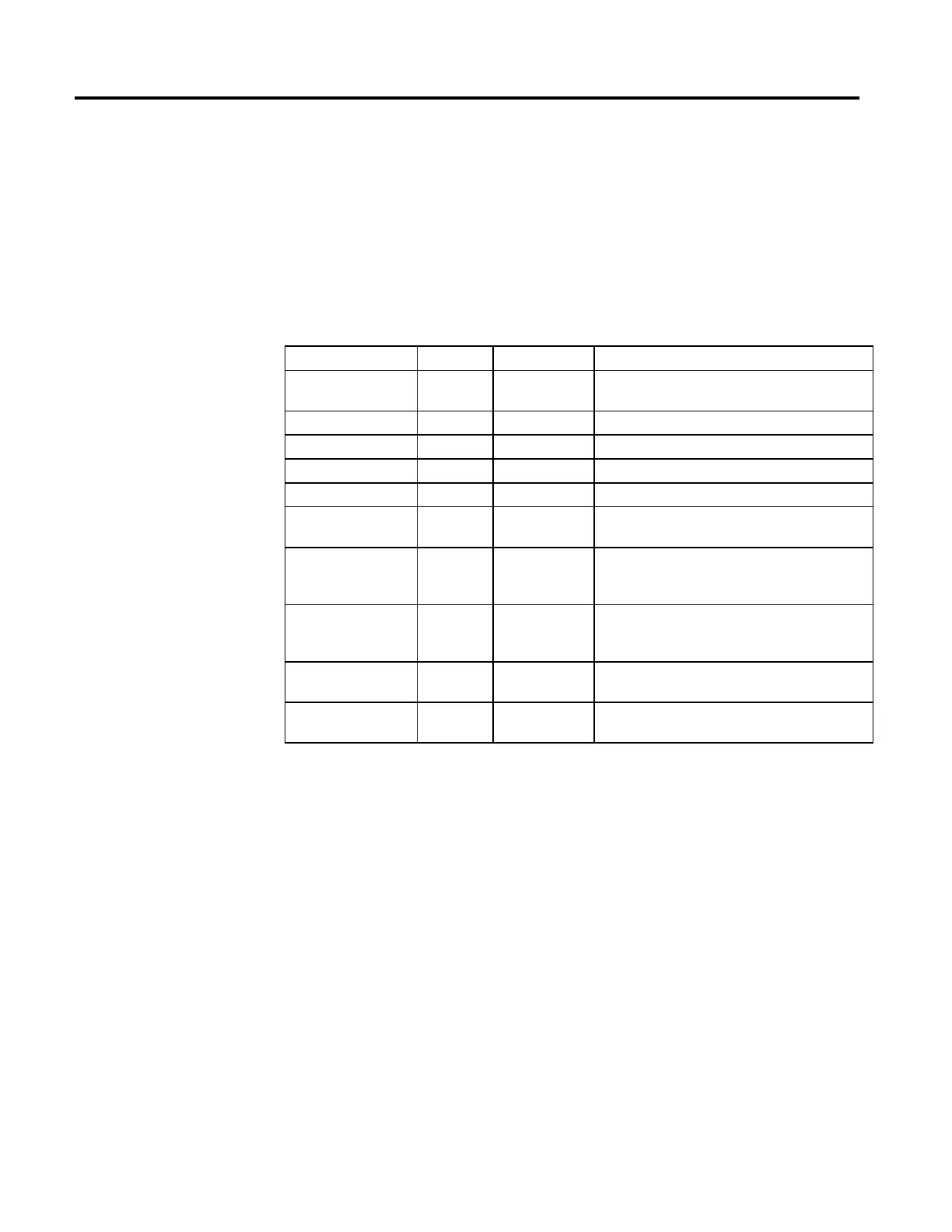
The axis configuration parameters that MRAT generates as output for CIP axis
are shown in the below table:
Axis Parameter Data Type Units Meaning
Tuning Status Integer - The Tune Status attribute returns status of the last run Inertia
Test service that initiates a process on the targeted drive axis.
Tune Accel Time Real Seconds Measured Acceleration time in seconds of the Tuning profile.
Tune Decel Time Real Seconds Measured Acceleration time in seconds of the Tuning profile.
Tune Accel Real Position Units/sec2 Measured Acceleration of the Tuning profile.
Tune Decel Real Position Units/sec2 Measured Deceleration of the Tuning profile.
Tune Inertia Mass Real % Motor Rated /
(Motor Units/Sec2)
The estimated inertia or mass for the axis as calculated from
the measurements made during the tuning process.
Tune Friction Real % Rated The amount of friction measured during Tuning profile. This
value can be used to configure the Friction Compensation
feature of the drive.
Tune Load Offset Real % Rated This value represents the active load offset measured during
the Tune profile. This value can be used to set the Torque
Offset of the drive to cancel out the active load torque/force.
Position Servo Bandwidth Real Hertz It represents the unity gain bandwidth of the position loop
that is used to calculate the position loop gains.
Velocity Servo Bandwidth Real Hertz It represents the unity gain bandwidth of the velocity loop
that is used to calculate the velocity loop gains.
The above output parameters generated by the MRAT instruction serve as inputs
to compute the Position and Velocity loop gains, Position and Velocity Error
Tolerances, Feed Forward Gains, Load Ratio, Maximum Acceleration, Maximum
Deceleration, System Inertia, System Acceleration and Friction Compensation.
If the Gain Tuning Config Bits parameter bit zero is the Run Inertia Test Bit.
This bit determines whether or not the MRAT tuning instruction will send a Test
Inertia service to the drive to perform an inertia measurement. If this bit is set, the
Inertia Test shall be performed. If the bit is clear, the MRAT will immediately
complete without an inertia measurement. It will only calculate the Pos and
Velocity Servo Loop Bandwidths based on the Loop response or the Damping
factor.
 Loading...
Loading...







