Motion Configuration Instructions
320 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Tune Status Parameter
Conditions may occur that make it impossible for the controller to properly
perform the tuning operation. When this is the case, the tuning process is
automatically aborted and a tuning fault reported that is stored in the Tune Status
output parameter (GSVable). It is also possible to manually abort a tuning process
using a Motion Axis Stop (MAS) instruction which results in a tuning fault
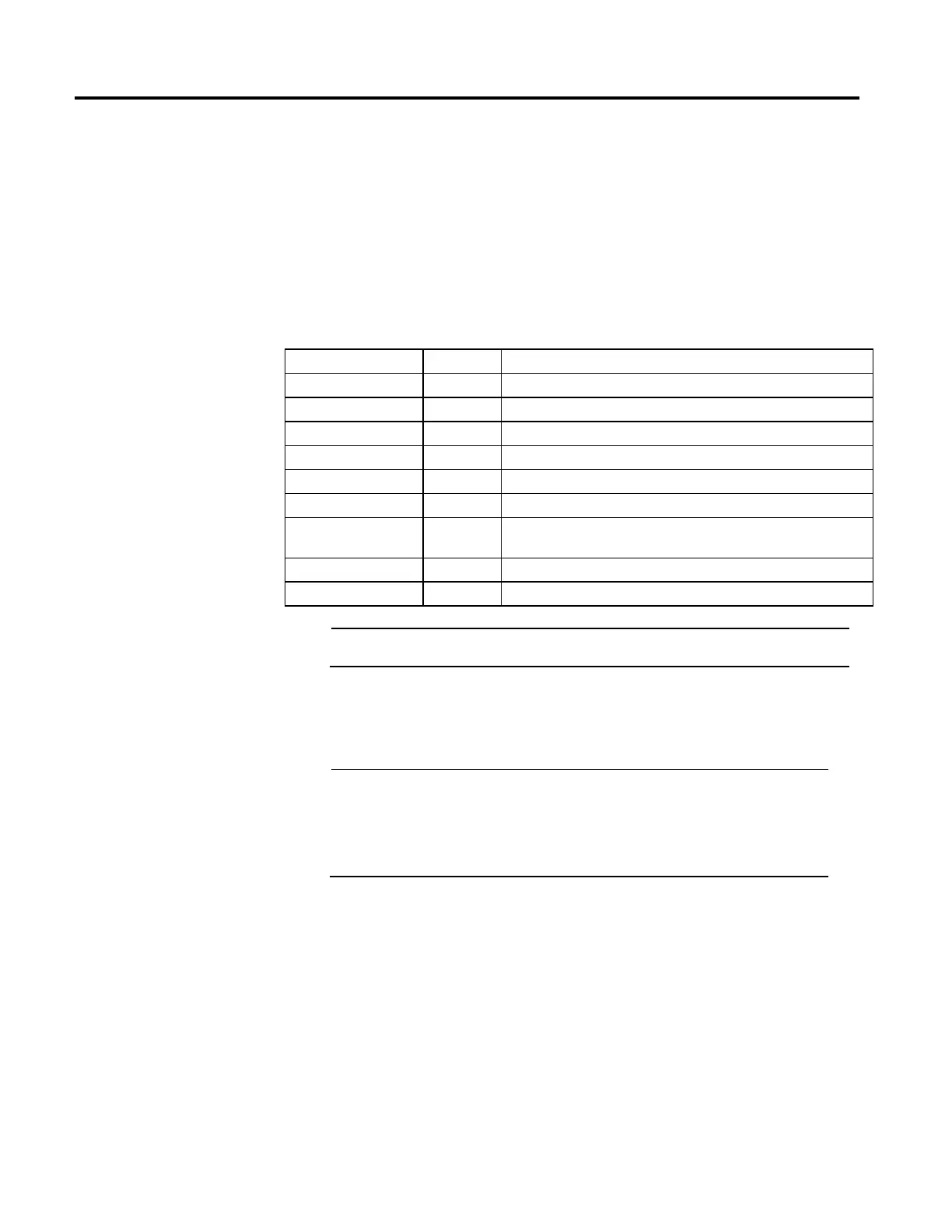
reported by the Tune Status parameter. Possible values for Tuning Status are
shown in the table below.
Status Code Code Meaning
Tune Success 0 Tune process has been successful.
Tune In Process 1 Tuning is in progress.
Tune Aborted 2 Tuning Process was aborted.
Tune Time-out 3 Tuning Process has timed out.
Tune Servo Fault 4 Tuning Process Failed due to Servo Fault.
Tune Travel Fault 5 Axis reached Tuning Travel Limit.
Tune Polarity Fault 6 Axis motion heading in wrong direction due to incorrect motor/encoder polarity
configuration.
Tune Speed Fault 7 Axis tuning speed too low to achieve minimum measurement accuracy.
Tune Configuration Fault 8 The specified axis tuning configuration is not allowed and a fault occurs.
Important:
The Tune Status Parameter is not to be mistaken for the .STATUS sub-tag of the MRAT instruction.
To successfully execute a MRAT instruction on an axis, the targeted axis must be
configured as a Servo Axis Type and the axis must be in the Axis Ready state. If
any of these conditions are not met than the instruction errs.
Important:
When the MRAT instruction is initially executed the In Process (.IP) bit is set and the Process
Complete (.PC) bit is cleared. The MRAT instruction execution can take multiple scans to
execute because it requires transmission of multiple messages to the motion module. The
Done (.DN) bit, is not set immediately, but only after these messages are successfully
transmitted. The In Process (.IP) bit is cleared and the Process Complete (.PC) bit is set at the
same time that the Done (.DN) bit is set.
In this transitional instruction, the relay ladder, toggle the Rung-condition-in
from cleared to set each time the instruction should execute.
Affects Math Status Flags
No
Major/Minor Faults
None specific to this instruction. See Common Attributes for operand-related
faults.
 Loading...
Loading...







