Motion Configuration Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 321
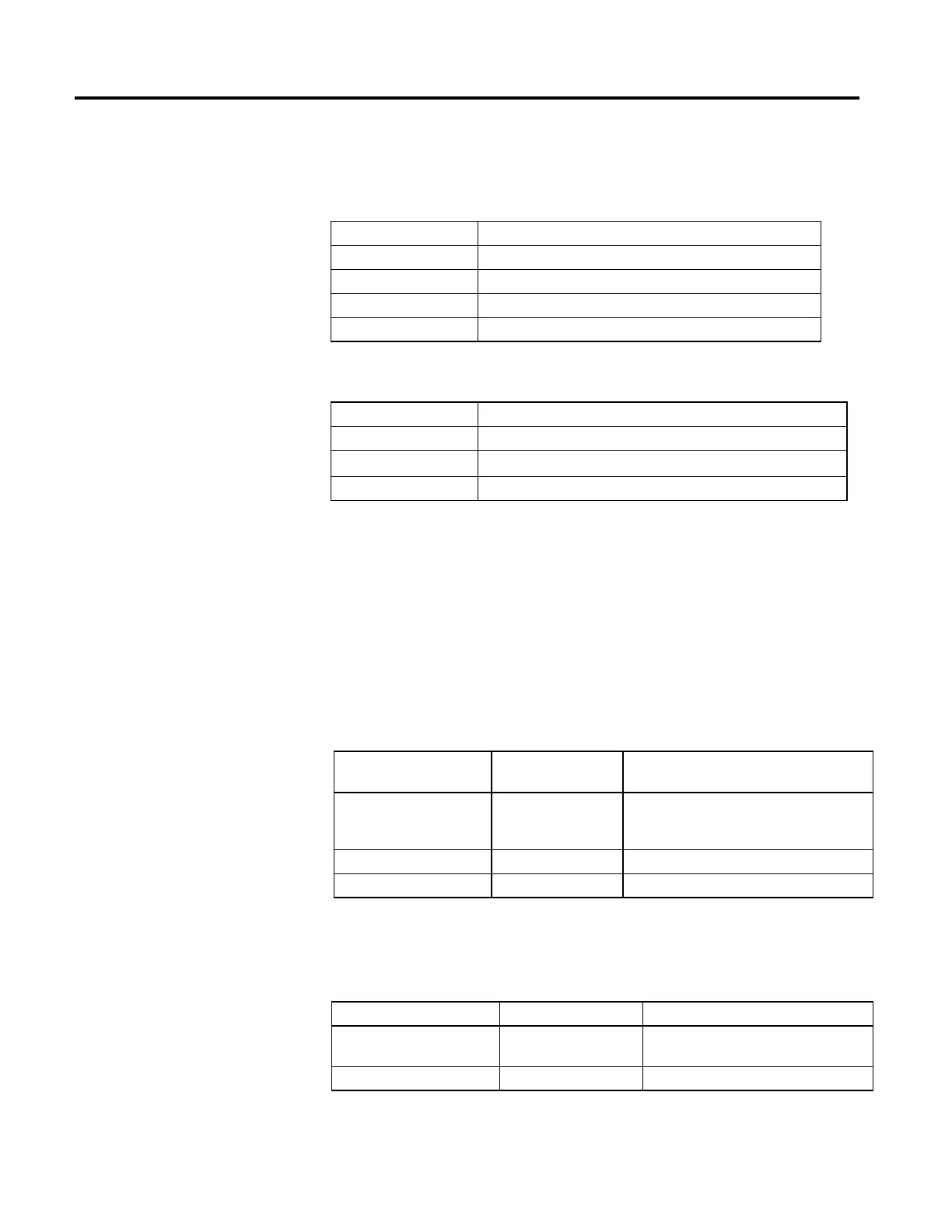
Execution
Ladder Diagram
Condition/State Action Taken
Prescan The .EN, .DN, .ER, and .IP bits are cleared to false.
Rung-condition-in is false The .EN bit is cleared to false if either the .DN or .ER bit is true.
Rung-condition-in is true The .EN bit is set to true and the instruction executes.
Postscan N/A
Structured Text
Condition/State Action Taken
Prescan See Prescan in the Ladder Diagram table.
Normal execution See Rung-condition-in is false, followed by rung is true in the Ladder Diagram table.
Postscan See Postscan in the Ladder Diagram table.
Error Codes
See Error Codes (ERR) for Motion Instructions.
Extended Error Codes
Extended Error Codes provide additional instruction specific information for the
Error Codes that are generic to many instructions. The following Extended Error
codes help to pinpoint the problem when the MRAT instruction receives a Servo
Message Failure (12) error message.
Associated Error Code
(decimal)
Extended Error Code
(decimal)
Meaning
SERVO_MESSAGE_FAILURE (12) Process terminated on
request (1)
Tune execution followed by an instruction to
shutdown/disable drive, or a motion stop instruction or
a Processor change requests a cancel of Tune.
SERVO_MESSAGE_FAILURE (12) Object Mode conflict (12) Axis is in shutdown.
SERVO_MESSAGE_FAILURE (12) Device in wrong state (16) Incorrect Tune Process order. (SERCOS)
Status Bits
MRAT Changes to Status Bits
Bit Name State Meaning
DriveEnableStatus TRUE Axis is in Drive Control state with the Drive Enable
output active while the Tuning Profile is running.
TuneStatus TRUE The axis is running a tuning process.
 Loading...
Loading...







