Motion Configuration Instructions
340 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
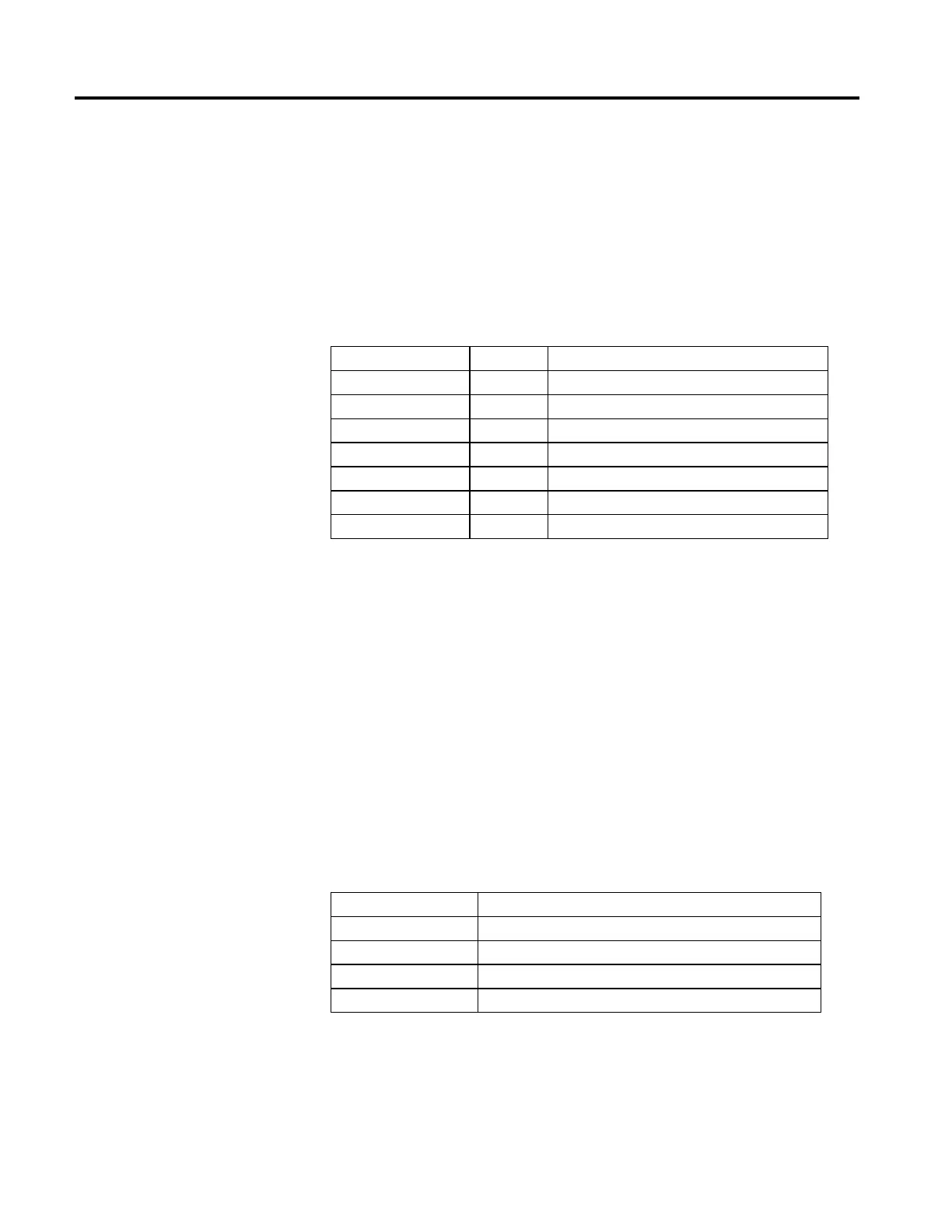
Test Status
This parameter returns the status of the last Run Hookup Test service on the
targeted drive axis. Conditions may occur that make it impossible for the control
to properly perform the test operation. When this is the case, the test process is
automatically aborted and a test fault is reported and stored in the Hookup Test
Status output parameter. Possible values for Test Status are shown in the table
below:
Error Message Code Definition
Test Success 0 Test Process has been successful.
Test In Process 1 Test is in progress.
Test Aborted 2 Test Process was aborted by user.
Test Time-out 3 Test Process has exceeded timed out (2 seconds).
Test Servo Fault 4 Test Process Failed due to Servo Fault.
No Feedback 1 5 Test Process Failed - no feedback 1 counts.
No Feedback 2 6 Test Process Failed - no feedback 2counts.
In this transitional instruction, the relay ladder, toggle the Rung-condition-in
from cleared to set each time the instruction should execute.
Affects Math Status Flags
No
Major/Minor Faults
None specific to this instruction. See Common Attributes for operand-related
faults.
Execution
Ladder Diagram
Condition/State Action Taken
Prescan The .EN, .DN, .ER, and .IP bits are cleared to false.
Rung-condition-in is false The .EN bit is cleared to false if either the .DN or .ER bit is true.
Rung-condition-in is true The .EN bit is set to true and the instruction executes.
Postscan N/A
 Loading...
Loading...







