Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 353
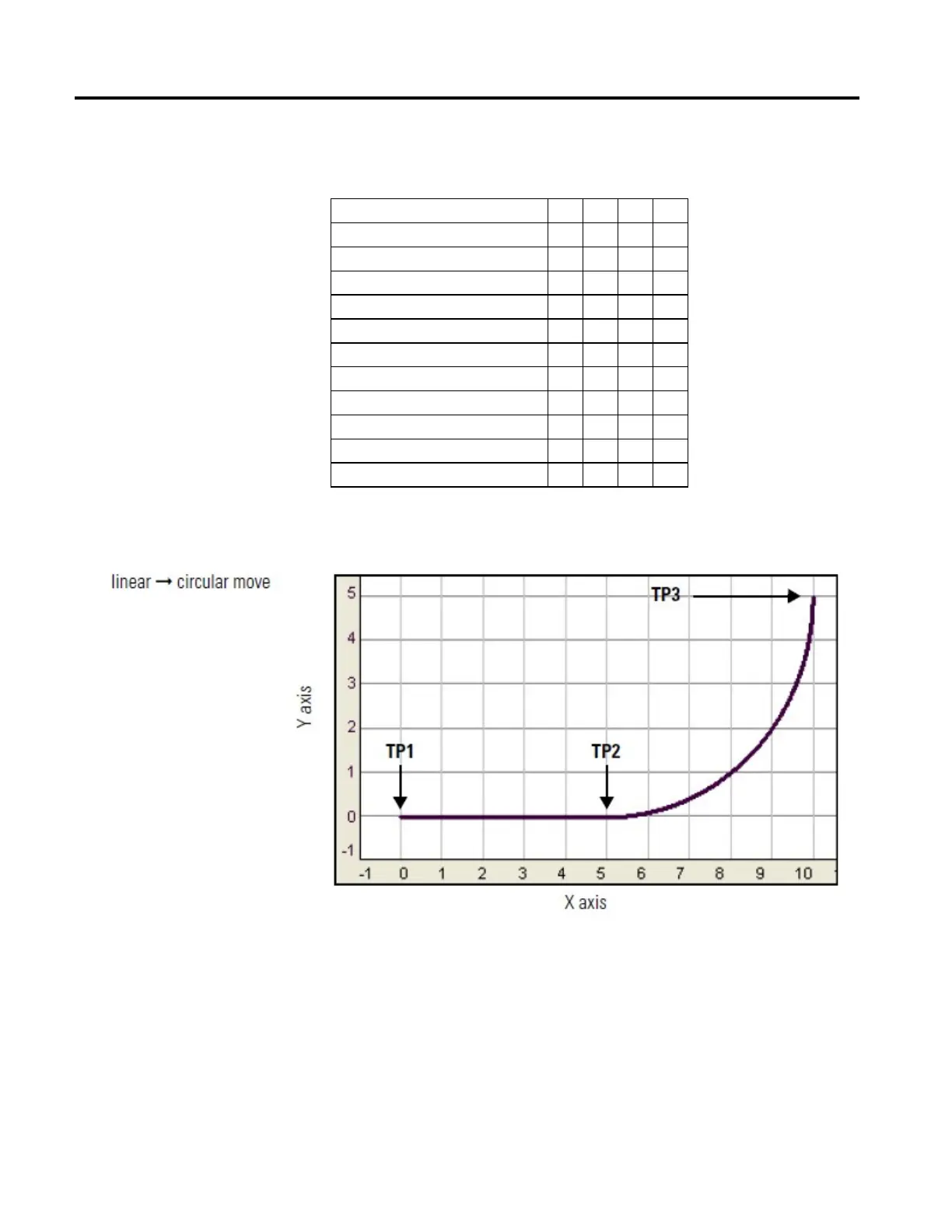
Command Tolerance termination type distance-to-go for transition point TP2 is
equal to Command Tolerance for the Coordinate System cs1.
Bit TP1 TP2 TP3 TP4
Move1.DN T T T T
Move1.IP T F F F
Move1.AC T F F F
Move1.PC F T T T
Move2.DN T T T T
Move2.IP T T T F
Move2.AC F T T F
Move2.PC F F F T
cs1.MoveTransitionStatus F T F F
cs1.MovePendingStatus T F F F
cs1.MovePendingQueueFullStatus T F F F
Bit States at Transition Points of Blended Move Using Follow Contour
Velocity Constrained or Unconstrained
 Loading...
Loading...







