Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 373
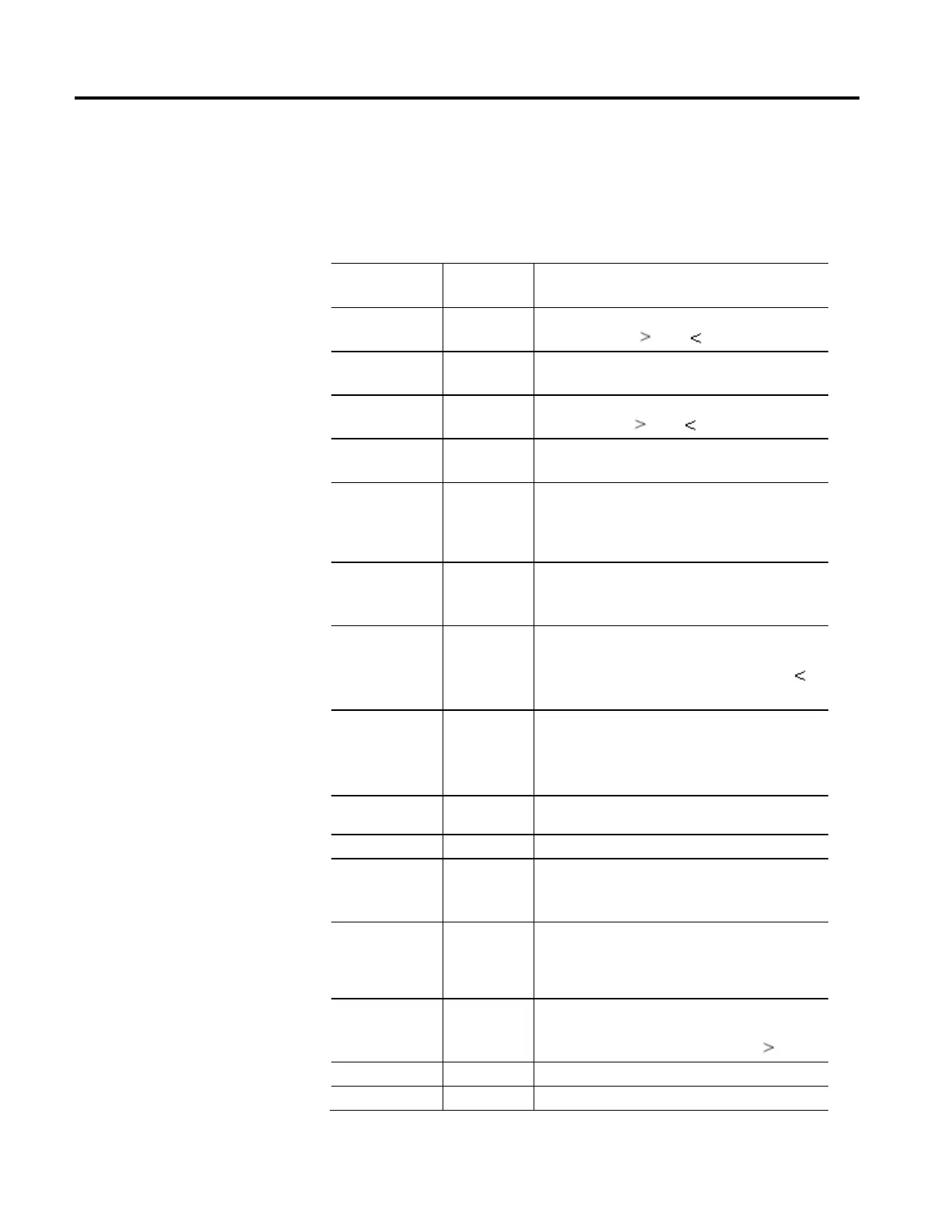
Extended Error codes
Extended Error codes help to further define the error message given by the
instruction. Their meaning is dependent upon the Error Code with which they are
associated.
Error
Code
EX_ERROR
Code
Description
13 3 Value Out Of Range (base angle)
Any orientation angle
360 or -360
13 3 Value Out Of Range (base ID)
ID equals -1
13 4 Value Out Of Range (tool angle)
Any orientation angle
360 or -360
13 4 Value Out Of Range (tool ID)
ID equals -1
61 1 Connection Conflict:
Transform Motion Group Error.
Cartesian or Robot coordinate system is ungrouped, or associated
to a different motion group from the other.
61 2 Connection Conflict:
Transform Duplicate Systems Error.
Operand 0 and Operand 1 are of the same coordinate system type.
61 3 Connection Conflict:
Transform Source Dimension Error.
Transform dimension of the Cartesian coordinate system is
2.
61 4 Connection Conflict:
Transform Target Dimension Error.
Robot coordinate system Transform Dimension is equal to zero.
61 5 Attempting to use the CS as multiple sources - FAN-OUT error.
61 6 Attempting to use the CS as multiple targets - FAN-IN error.
61 9 Connection Conflict
Transform Axes Overlap Error
An axis is a member of both the Cartesian and Robot systems.
61 10 Axis or axes are in motion with the below exception:
Gearing or camming motion is in progress on the Cartesian CS
axes. The Cartesian CS slave axes cannot have a master axis from
the Robot CS.
61 12 Connection Conflict
Transform Invalid Link Length
Link length values for any robot geometry must be
0.0 units.
61 13 Axis is shut down
61 14 Axis is inhibited
 Loading...
Loading...







