Multi-Axis Coordinated Motion Instructions
396 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
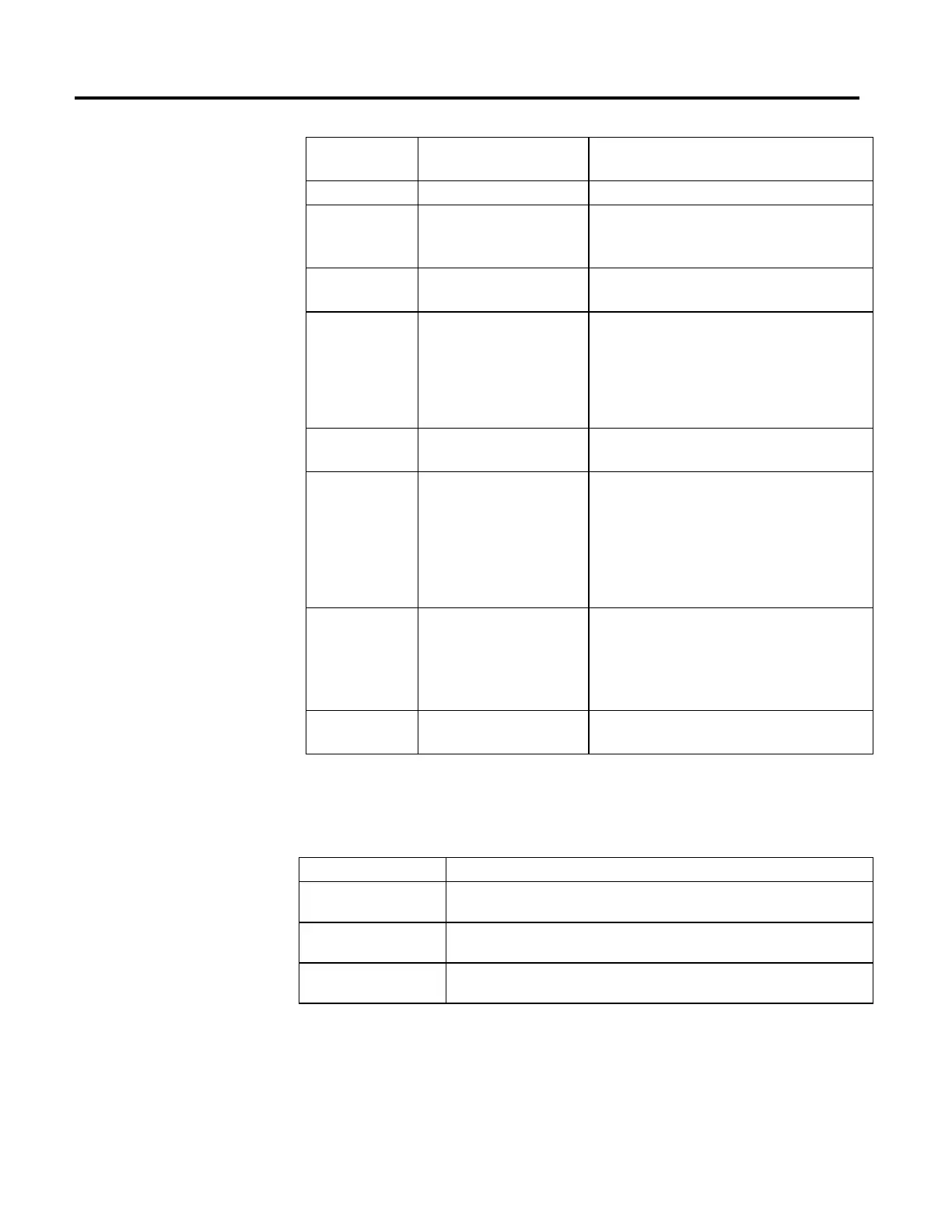
Change Decel no
yes
0 = No
1 = Yes
Decel Rate No enumeration immediate or tag
Decel Units unitspersec2
%ofmaximum
unitspermasterunit2
0
1
4
Change Accel Jerk no
yes
0 = No
1 = Yes
Accel Jerk No enumeration immediate or tag
You must always enter a value for the Accel operand. This
instruction only uses the value if the Profile is configured as
S-curve.
Use this value to get started.
Accel Jerk = 100 (% of Time)
Change Decel Jerk no
yes
0 = No
1 = Yes
Decel Jerk No enumeration immediate or tag
You must always enter a value Decel Jerk operand. This
instruction only uses the value if the Profile is configured as
S-curve.
Use this value to get started.
Decel Jerk = 100 (% of Time)
Jerk Units = 2
Jerk Units unitspersec3
%ofmaximum
%oftime
unitspermasterunit3
%oftimemasterdriven
0
1
2 (use this value to get started)
3
6
Scope activemotion
activeandpendingmotion
0 = Active Motion
1 = Active and Pending Motion
Outputs
The following table explains the instruction outputs.
Mnemonic Description
.EN (Enable) Bit 31 The Enable bit is set when the rung transitions from false to true. It resets when the rung
transitions from true to false.
.DN (Done) Bit 29 The Done bit resets when the rung transitions from false to true. It sets when target position is
calculated successfully.
.ER (Error) Bit 28 The Error bit resets when the rung transitions from false to true. It sets when target position fails
to calculate successfully.
 Loading...
Loading...







