Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 415
Important:
Risk of Velocity and/or End Position Overshoot
If you change move parameters dynamically by any method, that is by changing move dynamics
(MCD or MCCD) or by starting a new instruction before the last one has completed, be aware of the
risk of velocity and/or end position overshoot.
A Trapezoidal velocity profile can overshoot if maximum deceleration is decreased while the move is
decelerating or is close to the deceleration point.
An S-curve velocity profile can overshoot if:
maximum deceleration is decreased while the move is decelerating or close to the deceleration point;
or
maximum acceleration jerk is decreased and the axis is accelerating. Keep in mind, however, that jerk
can be changed indirectly if it is specified in % of time.
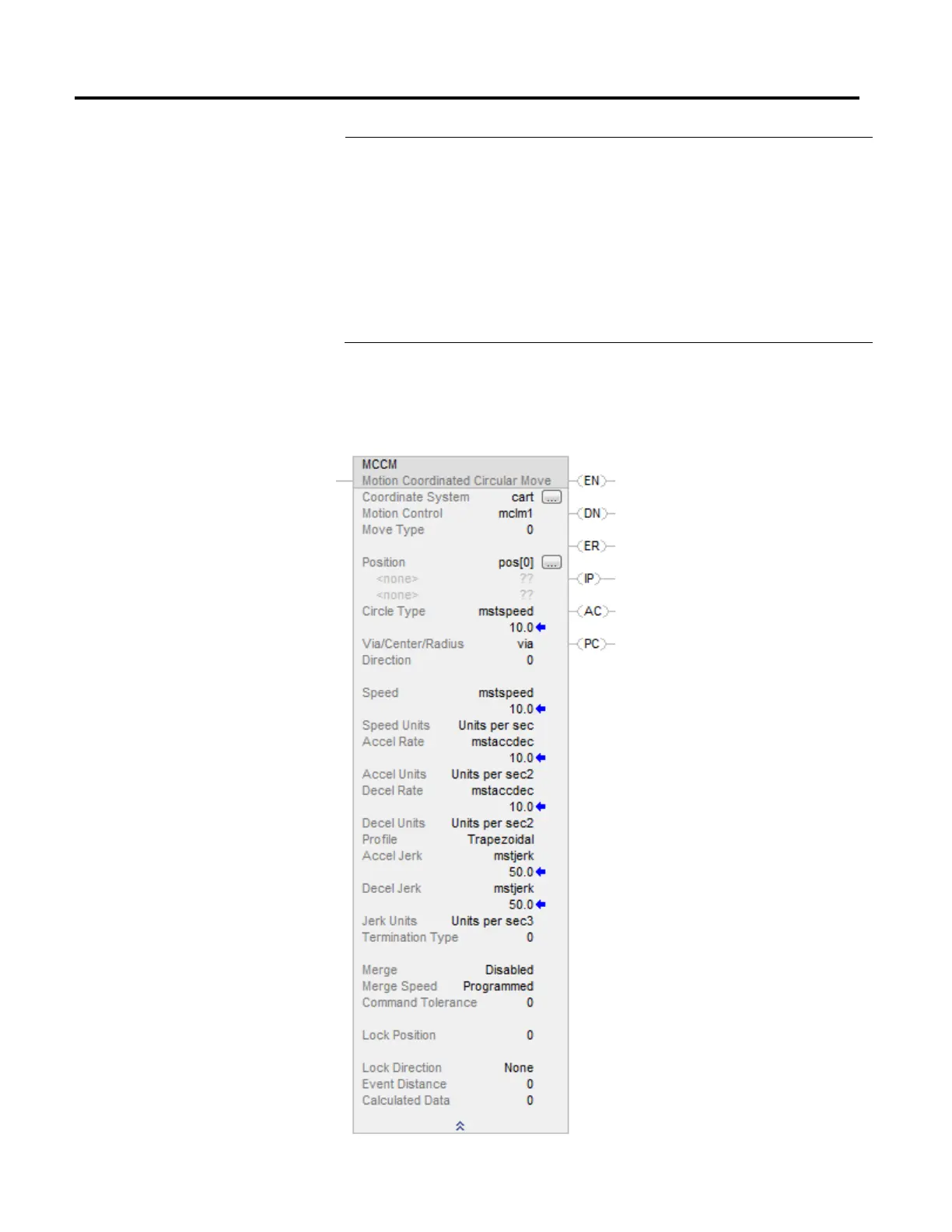
Available Languages
Ladder Diagram
 Loading...
Loading...







