Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 439
Operands
There are data conversion rules for mixed data types within an instruction. See
Data Conversion.
Ladder Diagram and Structured Text
The Motion Coordinated Linear Move (MCLM) instruction performs a linear
move using up to three (3) axes statically coupled as primary axes in a Cartesian
coordinate system. You specify whether to use an absolute or incremental target
position, the desired speed, maximum acceleration, maximum deceleration,
acceleration jerk, deceleration jerk, and the units of each. The actual speed is a
function of the programmed units of the speed (Units per sec, or % of Maximum,
as configured for the coordinate system), and the combination of primary axes that
are commanded to move. Each axis is commanded to move at a speed that allows
all axes to reach the programmed endpoint (target position) at the same time.
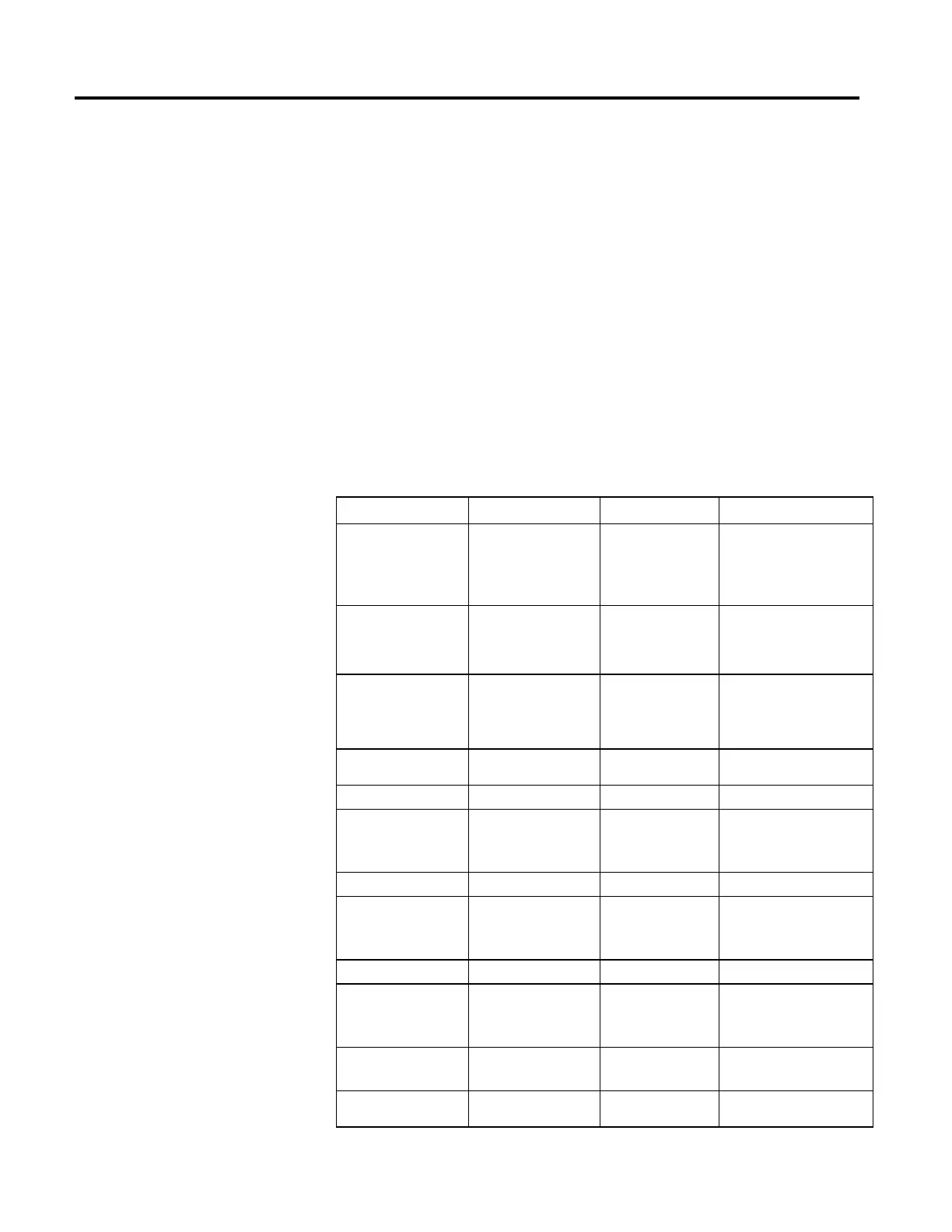
Operand Type Format Description
Coordinate System COORDINATE_SYSTEM Tag Coordinated group of axes.
Motion Control MOTION_INSTRUCTION Tag Structure used to access
instruction status parameters.
Move Type SINT, INT, or DINT Immediate or Tag Select the Move Type:
0 = Absolute
1 = Incremental
Position REAL Array tag [ ] [coordinate units]
Speed SINT, INT, DINT, or REAL Immediate or Tag [coordinate units]
Speed Units SINT, INT, or DINT Immediate 0 = Units per Sec
1 = % of Maximum
4 = Units per MasterUnit
Accel Rate SINT, INT, DINT, or REAL Immediate or Tag [coordinate units]
Accel Units SINT, INT, or DINT Immediate 0 = Units per Sec
2
1 = % of Maximum
4 = Units per MasterUnit
2
Decel Rate SINT, INT, DINT, or REAL Immediate or Tag [coordinate units]
Decel Units SINT, INT, or DINT Immediate 0 = Units per Sec
2
1 = % of Maximum
4 = Units per MasterUnit
2
Profile SINT, INT, or DINT Immediate 0 = Trapezoidal
1 = S-curve
Accel Jerk SINT, INT, DINT, or REAL Immediate or Tag You must always enter values for
 Loading...
Loading...







