Multi-Axis Coordinated Motion Instructions
446 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Velocity Profile Effects
Profile ACC/DEC Motor Priority of control
Highest to Lowest
Trapezoidal Fastest Worse Acc/Dec Velocity Position
S-Curve 2X Slower Best Jerk Acc/Dec Velocity Position
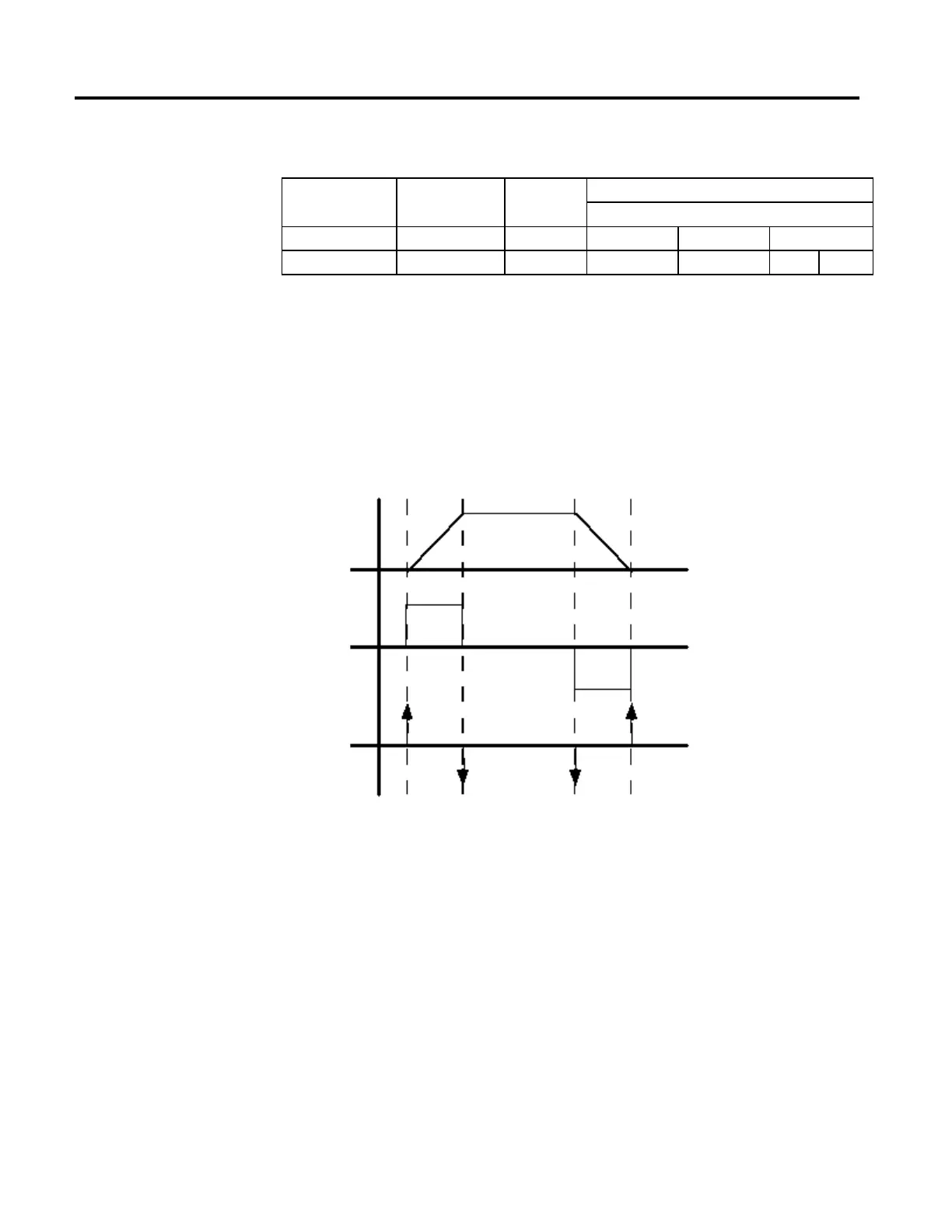
Trapezoidal
The trapezoidal velocity profile is the most commonly used profile since it
provides the most flexibility in programming subsequent motion and the fastest
acceleration and deceleration times. The maximum change in velocity is specified
by acceleration and deceleration. Since jerk is not a factor for trapezoidal profiles,
it is considered infinite and is shown as series of vertical lines in the following
graph.
S-curve
S-curve velocity profiles are most often used when the stress on the mechanical
system and load needs to be minimized. The S-curve profile, however, sacrifices
acceleration and deceleration time compared to the trapezoidal. The maximum
rate at which velocity can accelerate or decelerate is further limited by jerk.
Coordinate motion acceleration and deceleration jerk rate calculations are
performed when these instructions are started.
 Loading...
Loading...







