Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 481
Important:
You may see truncation error in the precision of computations. This happens when both of
these conditions are true:
• The conversion constants of the virtual Cartesian axes in a transformation are small, such
as 8000 counts/position unit.
• The link lengths of the non-Cartesian coordinate system are small, such as 0.5 inches.
It is best to give large conversion constants to the virtual Cartesian axes in a
transform, such as 100,000 or 1,000,000 counts/position unit. The maximum
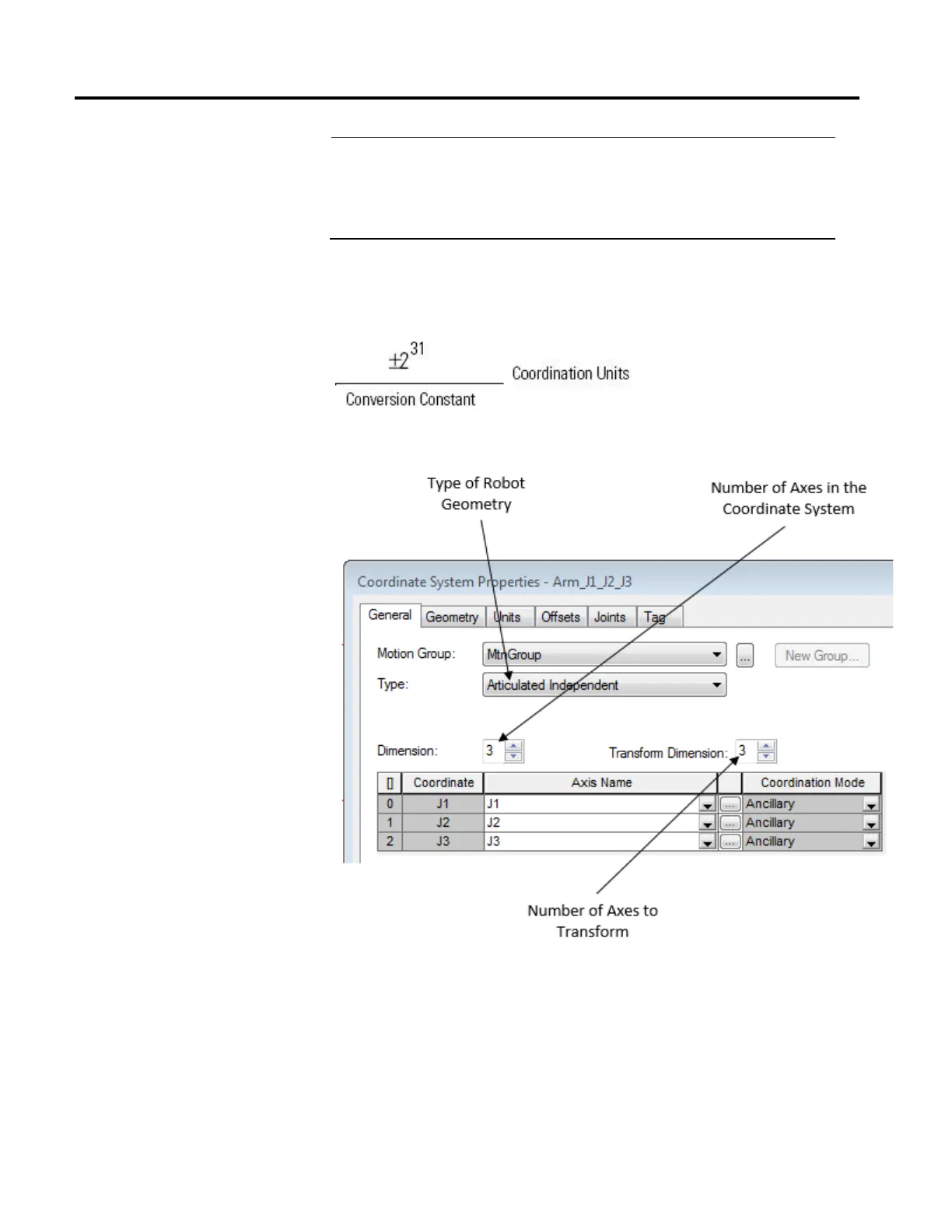
travel limit of the robot is:
Set up another coordinate system for the actual joints of the robot
 Loading...
Loading...







