Multi-Axis Coordinated Motion Instructions
482 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
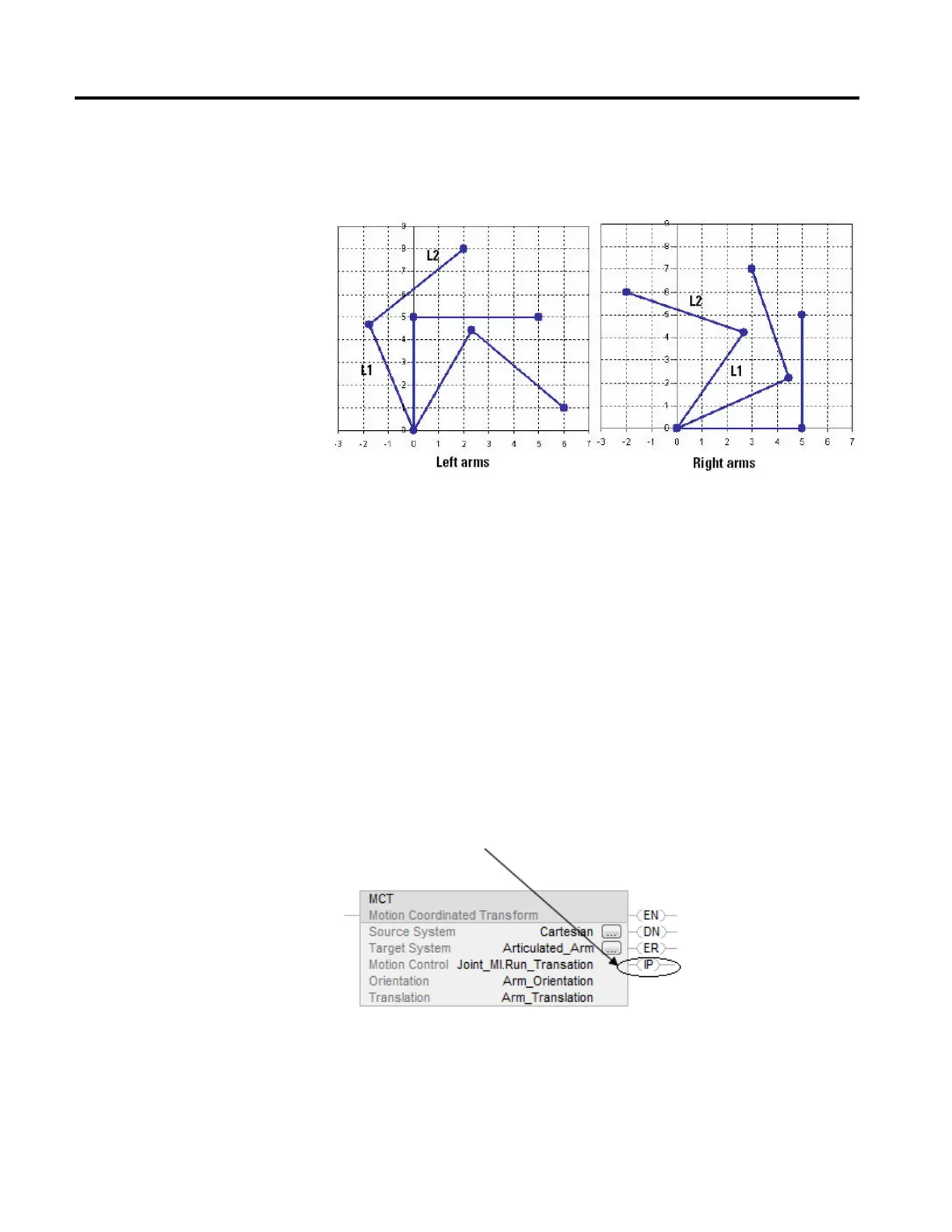
Move the robot to a left- or right-arm starting position
Do you want the robot to move like a left arm or a right arm?
Before you start the transform, move the robot to a resting position that gives it
the arm side that you want (left or right).
Once you start the transform and initiate a Cartesian move in the Source
coordinate system, the robot stays as a left arm or a right arm. If it starts as a left
arm, it moves as a left arm. If it starts as a right arm, it moves as a right arm. You
can always flip it from a left arm to a right arm or vice versa. To do that, move the
joints directly.
Toggle the rung from false to true to execute the instruction
This is a transitional instruction. In a ladder diagram, toggle the
Rung-condition-in from false to true each time you want to execute the
instruction.
When you execute the instruction, the transform starts and the IP bit turns on.
You can let the rung go false once you execute the instruction. The transform stays
active.
 Loading...
Loading...







