Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 501
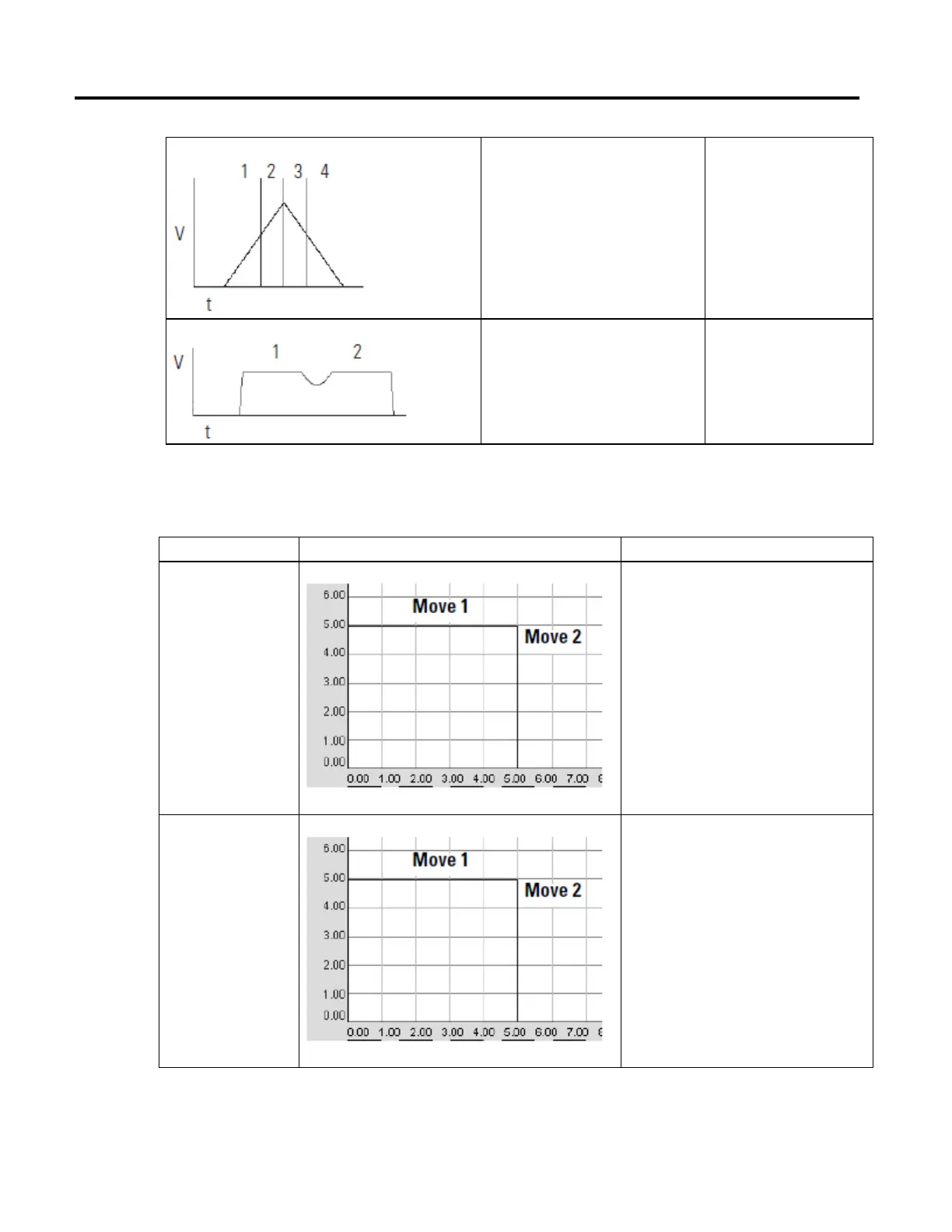
accelerate or decelerate across multiple moves.
5 - Follow Contour Velocity
Unconstrained
use a specified Command Tolerance
The command position gets within the Command
Position Tolerance of the coordinate system.
6 - Command Tolerance
Programmed
To make sure that this is the right choice for you:
• Review the tables below.
Termination Type Example Path Description
0 - Actual Tolerance
The instruction stays active until both of these happen:
• Command position equals target position.
• The vector distance between the target and actual
positions is less than or equal to the Actual Position
Tolerance of the coordinate system.
At that point, the instruction is complete and a queued
MCLM or MCCM instruction can start.
Important: Make sure that you set the Actual
Tolerance to a value that your axes can reach. Otherwise
the instruction stays in process.
1 - No Settle
The instruction stays active until the command position
equals the target position. At that point, the instruction
is complete and a queued MCLM or MCCM instruction
can start.
 Loading...
Loading...







