Motion Error Codes, faults, and attributes
580 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
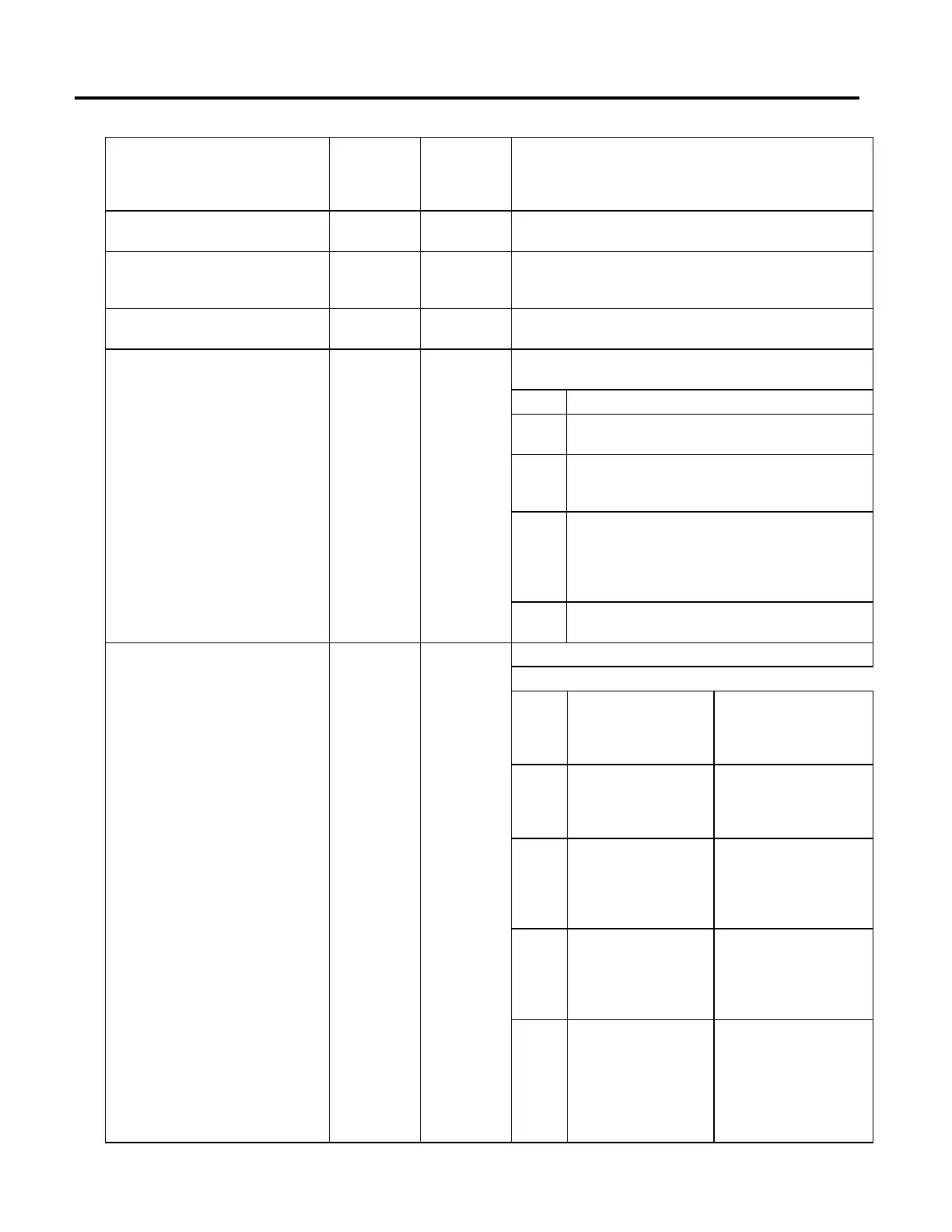
DampingFactor REAL GSV/SSV G11/Configuration
The value used in calculating the maximum position servo bandwidth during the
execution of the MRAT instruction. It controls the dynamic response of the servo
axis. The default value of 0.8 should work fine for most applications
DCBusVoltage DINT GSV G10/Status
The present voltage on the DC Bus of the drive.
DriveAxisID INT GSV G10/Configuration
Contains the CIP Product Code of the drive amplifier associated with the axis. If
the codes don't match, an error is returned during the configuration process.
DriveCapacity REAL GSV G10/Status
Represents the present utilization of drive capacity as a percent of rated capacity.
DriveFaultAction SINT GSV/SSV G9/Configuration
Sets the type of operation to be performed when a drive fault occurs.
Value Meaning
0 shutdown - most severe action to a fault; reserved for faults that
could endanger machinery or personnel
1 disabled drive - when the fault occurs, the drive is immediately
disabled, the servo output zeroed, and the drive enable output
deactivated
2 stop command - when the fault occurs, the axis immediately begins
decelerating the axis command position to a stop at the configured
Maximum Deceleration Rate, without disabling servo action or the
servo module's Drive Enable Output. This is the gentlest stopping
action for a fault
3 status only - when set to status only, motion faults must be handled
by the application program.
DriveFaultBits DINT GSV G10/Status
Bit Bit Name Meaning
0 PosSoftOvertravelFault Sets when the axis travels or
attempts to travel beyond the
configured value for Maximum
Positive Travel.
1 NegSoftOvertravelFault Sets when the axis travels or
attempts to travel beyond the
configured value for Maximum
Negative Travel.
2 PosHardOvertravelFault Sets when the axis travels or
attempts to travel beyond the
maximum position limit set by the
hardware limit switch mounted to
the machine.
3 NegHardOvertravelFault Sets when the axis travels or
attempts to travel beyond the
minimum position limit set by the
hardware limit switch mounted to
the machine.
4 FeedbackFault Sets when the differential
electrical signal for one or more of
the feedback channels are at same
level or loss of feedback power or
common electrical connection
between servo module or drive
and the feedback device.
 Loading...
Loading...







