www.bal dormotion.com
B-2 Control System MN1901
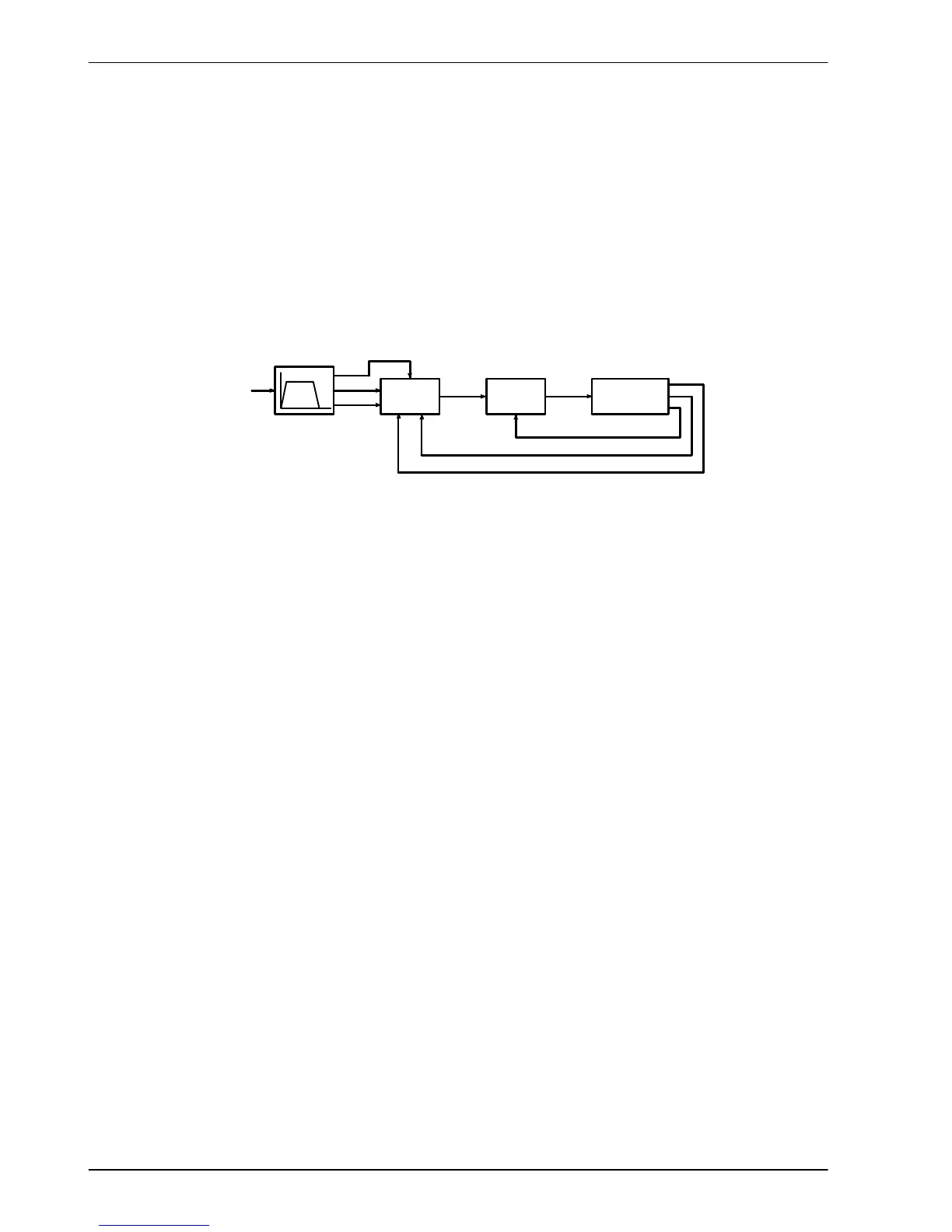
B.1.2 Positioning system without speed controller
Setting CONFIG to _cfTORQUE_SERVO configures the MintDrive
II
to act as a different type of
positioning system, as shown in Figure 53. Here, the speed controller is not present and the
position controller performs the task of speed tracking. To achieve this, the position controller
generates a torque demand signal directly. In most positioning applications, the control
structure which includes the speed loop (_cfSERVO) will give superior results. However , in a
few applications where stationary positioning accuracy is the most overriding criteria, removal
of the speed loop can sometimes be beneficial. This mode is also useful for applications which
are designed to stall at known torque while in position control.
Position
controller
Torque
controller
Power stage
+ motor
Torque
demand
PWM
Position
Speed
Accn
Position
profiler
Position
reference
Measured c ur r ent
Measured s peed
Measured pos ition
Figure 53 - Control structure in Torque Servo (_cfTorqueServo) configuration
 Loading...
Loading...



