WWW.BALLUFF.COM • 1-800-543-8390
9
Micropulse Linear Position Transducer
Absolute Quadrature Output
Rod Style & Profile Style Housings
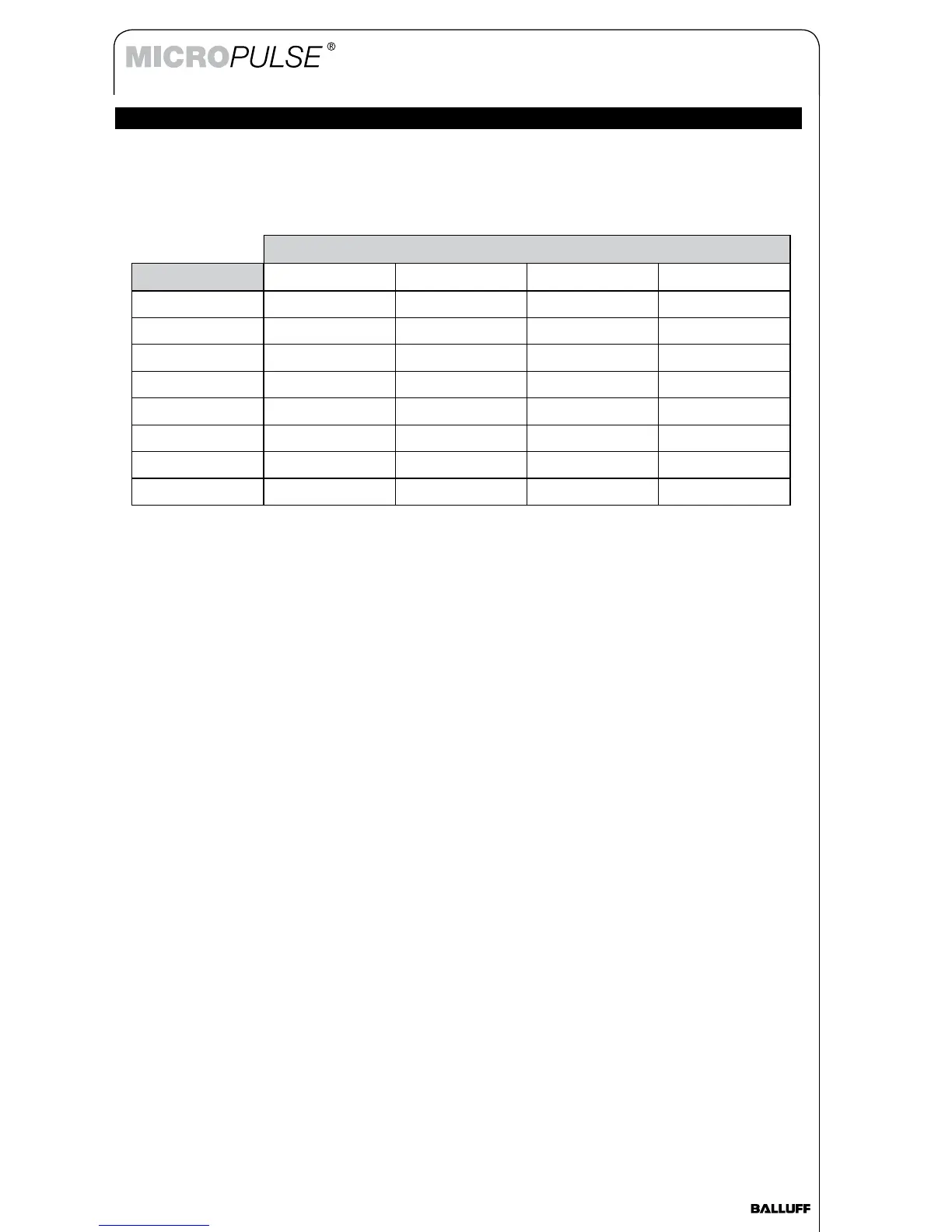
Resolution 833 kHz 416 kHz 208 kHz 10 kHz
1 µm 3.0 m/sec 1.5 m/sec 0.75 m/sec 0.0375 m/sec
2 µm 6.0 m/sec 3.0 m/sec 1.5 m/sec 0.075 m/sec
5 µm 10 m/sec 7.5 m/sec 3.75 m/sec 0.1875 m/sec
10 µm 10 m/sec 10 m/sec 7.5 m/sec 0.375 m/sec
50 µm 10 m/sec 10 m/sec 10 m/sec 1.875 m/sec
0.0001" 300 in/sec 150 in/sec 75 in/sec 3.75 in/sec
0.0005" 400 in/sec 400 in/sec 375 in/sec 18.75 in/sec
0.001" 400 in/sec 400 in/sec 400 in/sec 37.5 in/sec
If these speed constraints are exceeded, the transducer will not be able to send all of the necessary
pulses to represent a given amount of position change within a single update cycle. Note, however, that
pulses are never “discarded”. The transducer will attempt to output the remaining pulses on the next
update cycle.
Speed Constraints
The absolute maximum traverse velocity for the sensing magnet is 10 meters per second or 400 inches
per second. However, due to the fixed frequency of of the A and B outputs, there are additional
restrictions on maximum traverse velocity. Use the following table to determine maximum allowable
traverse velocity.
Pulse Frequency (Fixed)