Commissioning
• SAFEOP
• OP
to ensure sound operation. The EtherCAT Master directs these statuses in accordance with the initialization
routines that are defined for commissioning the device by the ES/XML and user settings (Distributed Clocks
(DC), PDO, CoE). See also the section on "Principles of Communication, EtherCAT State Machine [}21]" in
this connection. Depending how much configuration has to be done, and on the overall communication,
booting can take up to a few seconds.
The EtherCAT Master itself must go through these routines when starting, until it has reached at least the
OP target state.
The target state wanted by the user, and which is brought about automatically at start-up by TwinCAT, can
be set in the System Manager. As soon as TwinCAT reaches the status RUN, the TwinCAT EtherCAT
Master will approach the target states.
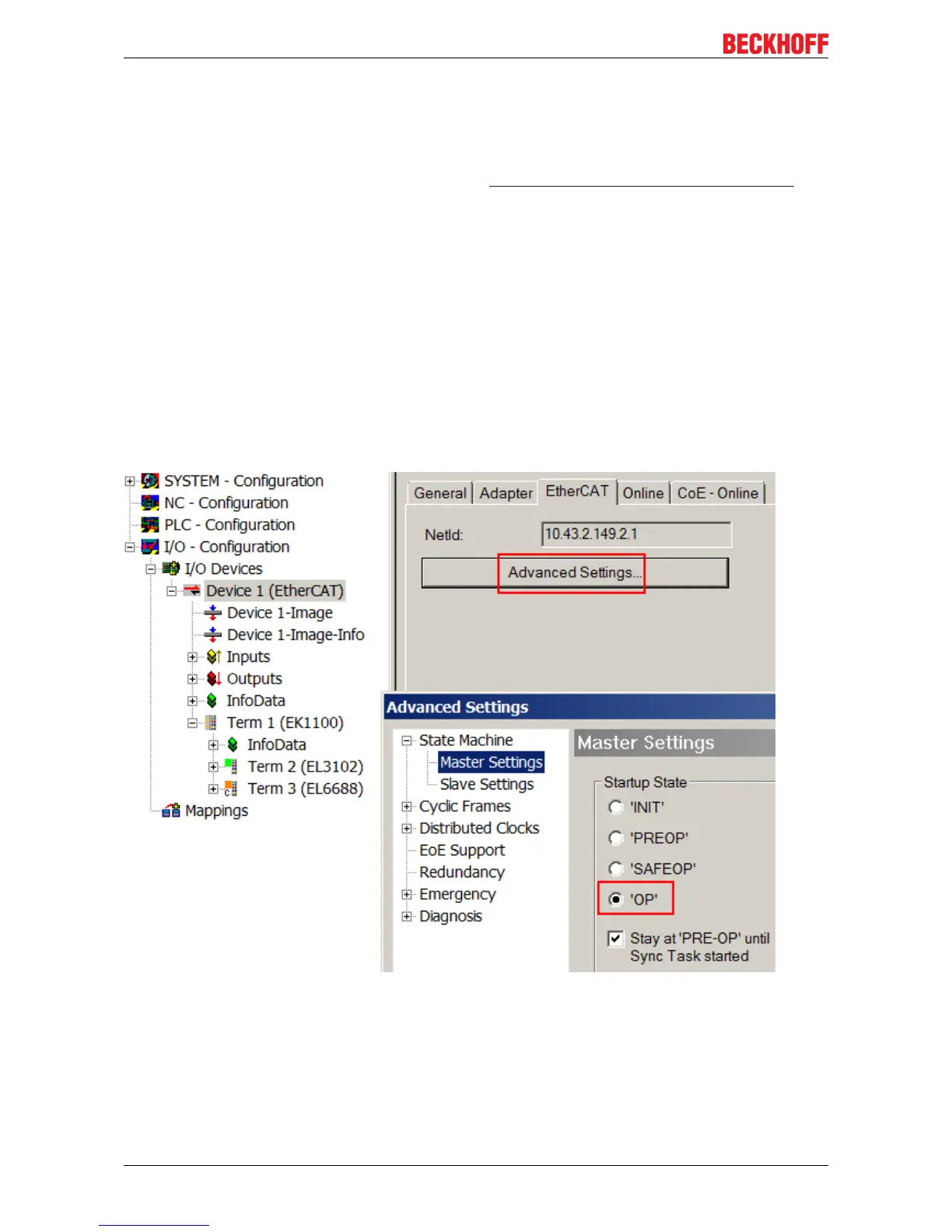
Standard setting
The advanced settings of the EtherCAT Master are set as standard:
• EtherCAT Master: OP
• Slaves: OP
This setting applies equally to all Slaves.
Fig.90: Default behaviour of the System Manager
In addition, the target state of any particular Slave can be set in the "Advanced Settings" dialogue; the
standard setting is again OP.
EL72x1-001074 Version: 2.0