4.8 Parameter Group 7: Controllers
4.8.1 7-** Controllers
Parameters group for configuring application controls.
4.8.2 7-2* Process Ctrl. Feedback
Select feedback sources and handling for Process PI
Control.
NOTE
Set 3-15 Reference 1 Source to [0] No Function in order to
use Analog Input as a feedback signal.
In order to use analog input as a feedback resource, do
not use the same resource as reference resource in 3-15,
3-16 and 3-17.
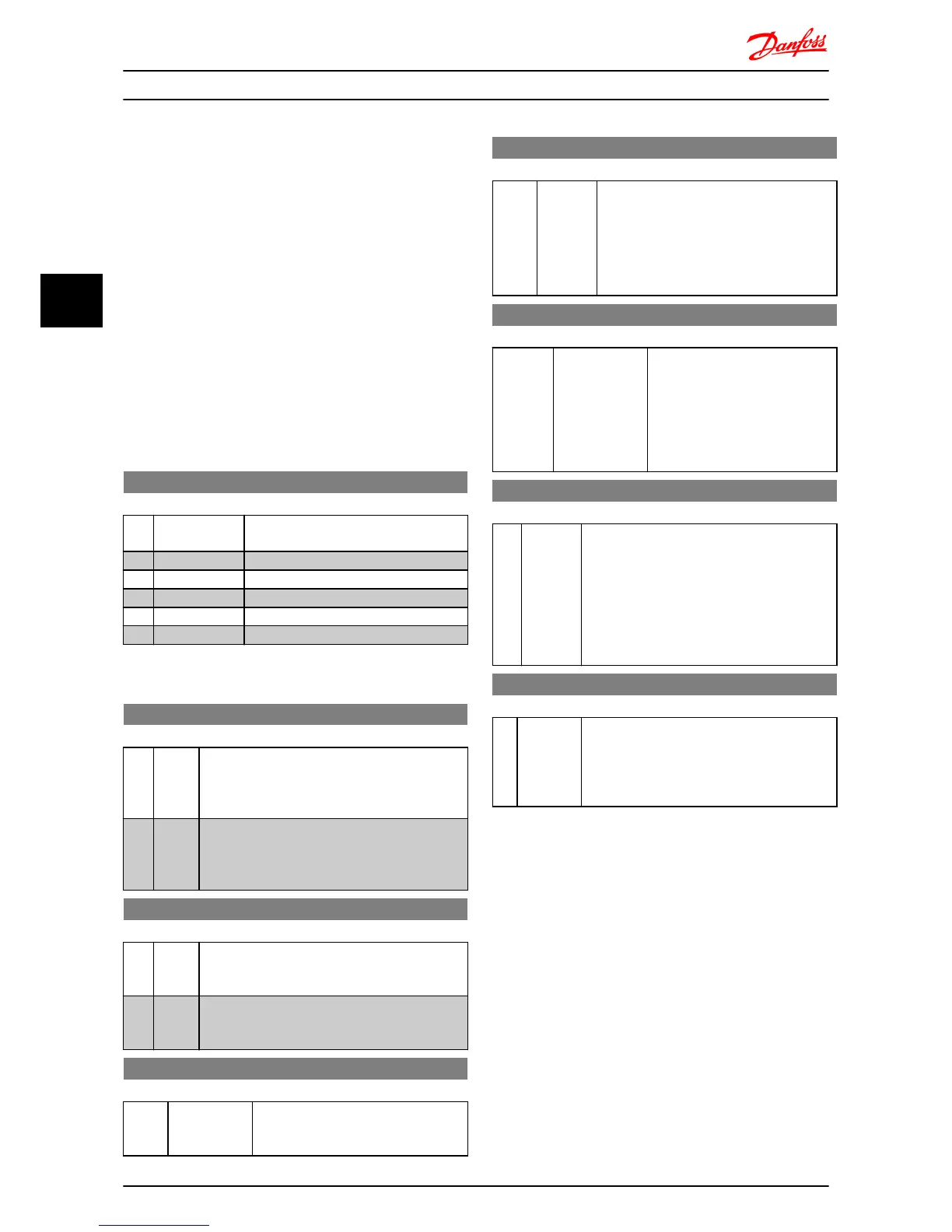
7-20 Process CL Feedback Resources
Option: Function:
Select input to function as feedback
signal.
[0] * No Function
[1] Analog Input 53
[2] Analog Input 60
[8] Pulse Input 33
[11] Local Bus Ref.
4.8.3 7-3* Process PI Control
7-30 Process PI Normal/Inverse Control
Option: Function:
[0] * Normal Feedback larger than setpoint result in a speed
reduction.
Feedback less than setpoint result in a speed
increase.
[1] Inverse Feedback larger than setpoint result in a speed
increase.
Feedback less than setpoint result in a speed
reduction.
7-31 Process PI Anti Windup
Option: Function:
[0] Disable Regulation of a given error will continue even
when the output frequency cannot be increased/
decreased.
[1] * Enable PI-controller ceases from regulating a given error
when the output frequency cannot be increased/
decreased.
7-32 Process PI Start Speed
Range: Function:
0.0 Hz* [0.0-200.0 Hz] Until the set motor speed has been
reached the frequency converter
operates in Open Loop mode.
7-33 Process PI Proportional Gain
Option: Function:
[0.01] * 0.00-10.00 Enter the value for the P proportional gain,
i.e. the multiplication factor of the error
between the set point and the feedback
signal.
NOTE
0.00 = Off.
7-34 Process PI Integral Time
Range: Function:
9999.00 s* [0.10-9999.00 s] The integrator provides an
increasing gain at a constant error
between the set point and the
feedback signal. The integral time
is the time needed by the
integrator to reach the same gain
as the proportional gain.
7-38 Process Feed Forward Factor
Range: Function:
0%* [0-400%] The FF factor sends a part of the reference
signal around the PI controller which then only
affects part of the control signal.
By activating the FF factor less overshoot and
high dynamics are gained when changing the
setpoint.
This parameter is always active when 1-00
Configuration Mode is set to [3] Process.
7-39 On Reference Bandwidth
Range: Function:
5% [0-200% ] Enter the value for the On Reference Bandwidth.
The PI control error is the difference between
setpoint and feedback and when this is less
than the value set in this parameter the On
Reference is active.
Parameter Descriptions
VLT
®
Micro Drive FC 51 Programming Guide
36 MG02C602 - VLT
®
is a registered Danfoss trademark
44

 Loading...
Loading...









