Preset ref. bit 2 1 0
Preset ref. 0 0 0 0
Preset ref. 1 0 0 1
Preset ref. 2 0 1 0
Preset ref. 3 0 1 1
Preset ref. 4 1 0 0
Preset ref. 5 1 0 1
Preset ref. 6 1 1 0
Preset ref. 7 1 1 1
Table 4.1 Preset Ref. Bit
[19] Freeze
ref
Freezes the actual reference, which is now the
point of enable/condition for [21] Speed up and [22]
Speed down to be used. If [21] Speed up or [22]
Speed down is used, the speed change always
follows ramp 2 (parameter 3-51 Ramp 2 Ramp Up
Time and parameter 3-52 Ramp 2 Ramp Down Time)
in the range 0–parameter 3-03 Maximum Reference.
[20] Freeze
output
NOTICE
When [20] Freeze output is active, the
frequency converter cannot be stopped by
setting the signal on [8] Start to low. Stop
the frequency converter via a terminal
programmed for [2] Coasting inverse or [3]
Coast and reset, inverse.
Freezes the actual motor frequency (Hz), which is
now the point of enable/condition for [21] Speed
up and [22] Speed down to be used. If [21] Speed up
or [22] Speed down is used, the speed change
always follows ramp 2 (parameter 3-51 Ramp 2
Ramp Up Time and parameter 3-52 Ramp 2 Ramp
Down Time) in the range 0–parameter 1-23 Motor
Frequency.
[21] Speed
up
Select [21] Speed up and [22] Speed down if digital
control of the up/down speed is needed (motor
potentiometer). Activate this function by selecting
either [19] Freeze reference or [20] Freeze output.
When speed up/down is activated for less than 400
ms, the resulting reference is increased/decreased
by 0.1%. If speed up/down is activated for more
than 400 ms, the resulting reference follows the
setting in ramping up/down parameter 3-x1/3-x2.
Shut down Catch up
Unchanged speed 0 0
Reduced by %-value 1 0
Increased by %-value 0 1
Reduced by %-value 1 1
Table 4.2 Shut Down/Catch Up
[22] Speed
down
Same as [21] Speed up.
[23] Set-up
select bit
0
Select [23] Set-up select bit 0 or [1] Set-up select
bit 1 to select 1 of the 2 set-ups. Set
parameter 0-10 Active Set-up to [9] Multi Set-up.
[24] Set-up
select bit
1
Default digital input 32. Same as [23] Set-up select
bit 0.
[26] Precise
stop inv.
Precise stop inverse function is available for
terminals 18 or 19.
[27] Precise
start
stop
[28] Catch up Increases reference value by percentage (relative)
set in parameter 3-12 Catch up/slow Down Value.
[29] Slow
down
Reduces reference value by percentage (relative)
set in parameter 3-12 Catch up/slow Down Value.
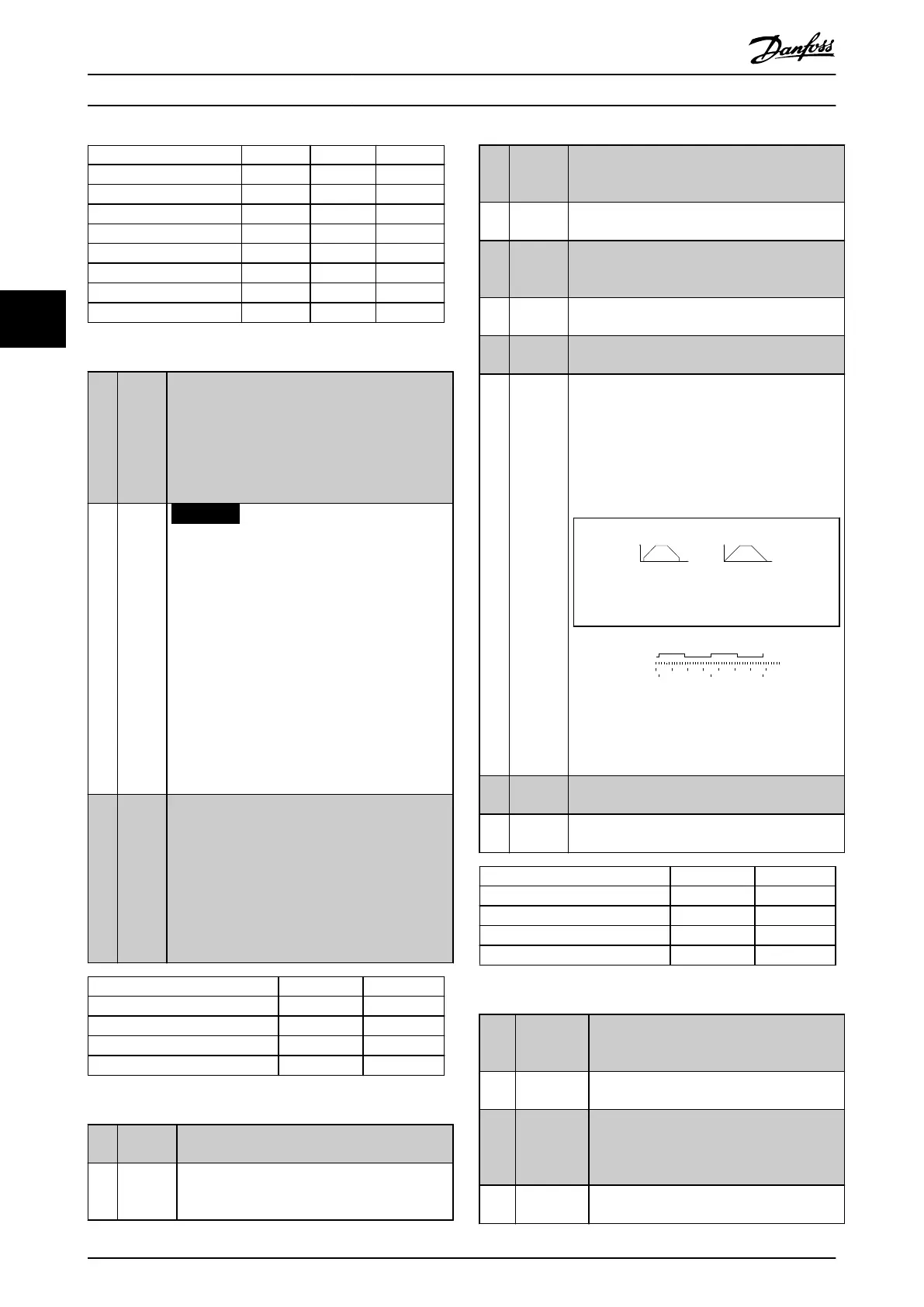
[32] Pulse
time-
based
Measures the duration between pulse anks. This
parameter has a higher resolution at lower
frequencies, but is not as precise at higher
frequencies. This principle has a cut-o
frequency, which makes it unsuited for encoders
with low resolutions (for example 30 PPR) at low
speeds.
Speed [rpm] Speed [rpm]
Time[sec] Time[sec]a b
130BB462.10
a: Low encoder
resolution
b: Standard encoder
resolution
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
Illustration 4.9 Duration Between Pulse Flanks
[34] Ramp bit
0
Enables a selection from the 4 ramps available,
according to Table 4.3.
[35] Ramp bit
1
Same as ramp bit 0.
Preset ramp bit 1 0
Ramp 1 0 0
Ramp 2 0 1
Ramp 3 1 0
Ramp 4 1 1
Table 4.3 Preset Ramp Bits
[40] Latched
precise
start
[41] Latch prec
stop inv
[51] External
interlock
This function makes it possible to give an
external fault to the frequency converter. This
fault is treated in the same way as an
internally generated alarm.
[58] DigiPot
Hoist
Parameter Descriptions
VLT
®
Midi Drive FC 280
52 Danfoss A/S © 12/2015 All rights reserved. MG07C102
44
 Loading...
Loading...
















