Chapter 12 Description of Parameter SettingsCP2000
12.1-00-9
575V 690V
Settings 2–9 kHz 2–9 kHz
Light Load
Models 2–20 HP [1.5–15 kW] 25–745 HP [18.5–560 kW]
Default 4 kHz 4 kHz*
1
Normal
Load
Models 2–20 HP [1.5–15 kW] 25–745 HP [18.5–560 kW]
Default 4 kHz 4 kHz*
1
*1. Light load / Normal load: the default for 690V, 630 kW [850 HP] model is 3 kHz.
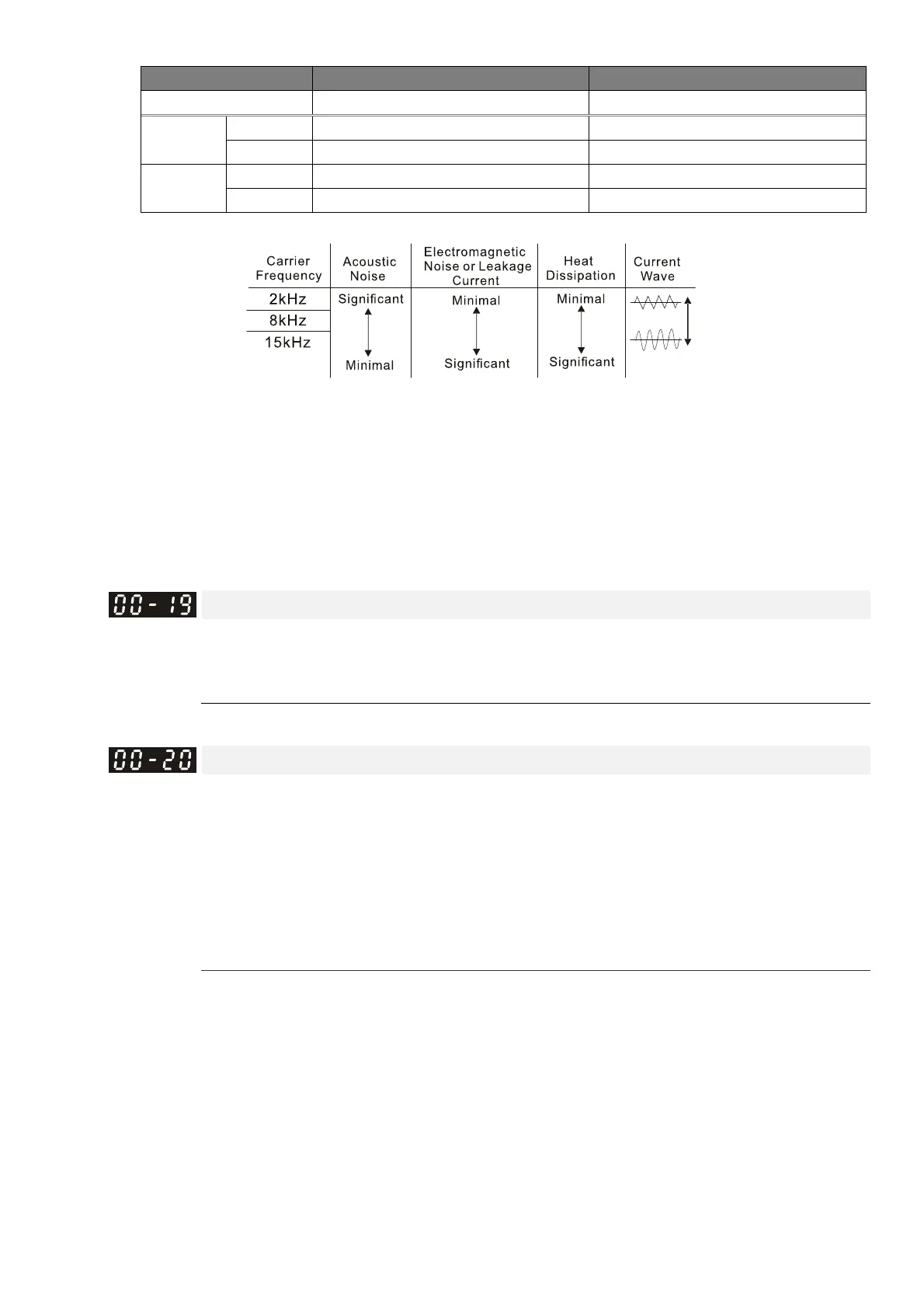
From the table, you see that the PWM carrier frequency has significant influences on the
electromagnetic noise, the AC motor drive heat dissipation, and the motor acoustic noise.
Therefore, if the surrounding noise is greater than the motor noise, lower the carrier frequency to
reduce the temperature rise. Although the motor has quiet operation in the higher carrier
frequency, consider the entire wiring and interference.
When the carrier frequency is higher than the default, decrease the carrier frequency to protect
the drive. Refer to Pr.06-55 for the related setting and details.
PLC Command Mask
Default: Read Only
Settings bit0: Control command forced by PLC control
bit1: Frequency command forced by PLC control
Determines if frequency command or control command is locked by PLC
Master Frequency Command (AUTO) Source / Source Selection of the PID Target
Default: 0
Settings 0: Digital keypad
1: RS-485 communication
2: External analog input (Pr.03-00)
3: External UP/DOWN terminal (multi-function input terminal)
6: CANopen communication card
8: Communication card (does not include CANopen card)
Set the master frequency source in AUTO mode.
Pr.00-20 and Pr.00-21 are for settings the frequency source and operation source in AUTO mode.
Pr.00-30 and Pr.00-31 are for settings the frequency source and operation source in HAND mode.
You can switch the AUTO/HAND mode with the keypad KPC-CC01 or the multi-function input
terminal (MI).
The default for the frequency source or operation source is AUTO mode. It returns to AUTO mode
whenever you cycle the power. If you use a multi-function input terminal to switch between AUTO
and HAND mode, the highest priority is the multi-function input terminal. When the external
terminal is OFF, the drive does not accept any operation signal and cannot execute JOG.

 Loading...
Loading...


