Chapter 15 CANopen Overview│CP2000
15-10
When the control section switches from Power Enable to Power Disable, use 605C to define parking
method.
Index Sub Definition Default R/W Size Unit
PDO
Map
Mode note
605Ch 0
Disable operation option
code
1 RW S16 No
0: Disable drive function
1: Slow down with slow down
ramp; disable of the drive
function
15-3-2-3 Various mode control method (by following DS402 standard)
CP2000 currently only supports speed control which is described as below:
Speed mode
1. Set CP2000 to speed control mode: set Index6060 to 2.
2. Switch to Operation Enable mode: Set 6040=0xE, then set 6040 = 0xF.
3. Set the target frequency: Set target frequency of 6042, since the operation unit of 6042 is rpm, a
transform is required:
For example:
Set 6042H = 1500 (rpm), if the number of poles is 4 (Pr.05-04 or Pr.05-16), then the motor drive's
operation frequency is 1500 / (120/4)=50 Hz. The 6042 is defined as a signed operation. The
plus or minus sign means to rotate clockwise or counter clockwise
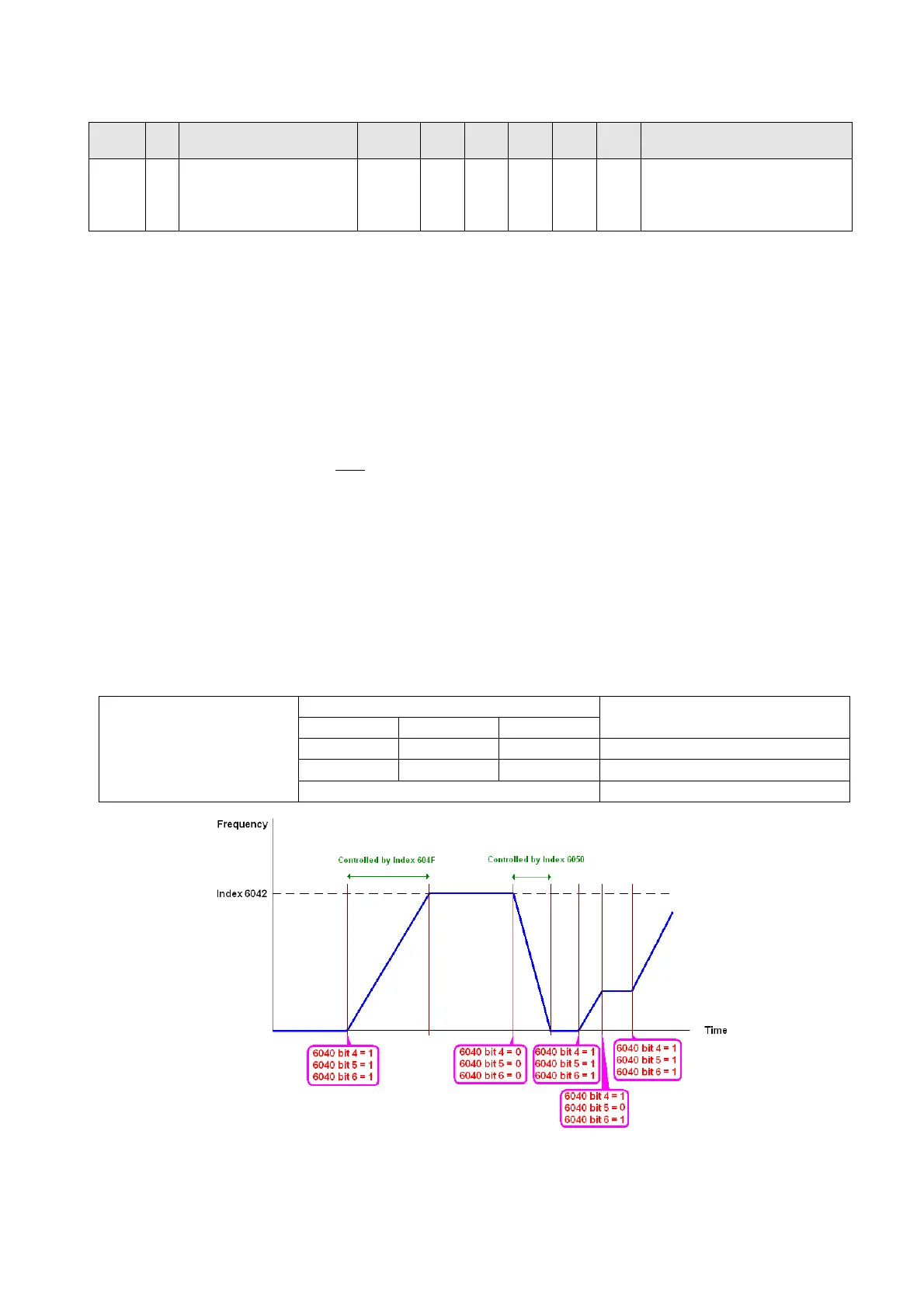
4. To set acceleration and deceleration: Use 604F (Acceleration) and 6050 (Deceleration).
5. Trigger an ACK signal: in the speed control mode, the bit6–4 of Index 6040 needs to be controlled.
It is defined as below:
Speed mode
(Index 6060=2)
Index 6040
SUM
bit6 bit5 bit4
1 0 1 Locked at the current signal.
1 1 1 Run to reach targeting signal.
Other Decelerate to 0 Hz.
NOTE 01: Read 6043 to get the current rotation speed. (Unit: rpm)
NOTE 02: Read bit10 of 6041 to find if the rotation speed has reached the targeting value. (0: Not
reached; 1: Reached)
p
120
fn
n: rotation speed (rpm) (rounds/minute)
P: motor’s pole number (Pole)
f: rotation frequency (Hz)
 Loading...
Loading...



