Cartesian coordinates of each manipulator type is different, and the position of the corresponding
Cartesian coordinate origin is also different.
After setting the manipulator’s parameters, the origin and direction of the Cartesian
coordinates are determined, and the direction of the Cartesian coordinates cannot be modified.
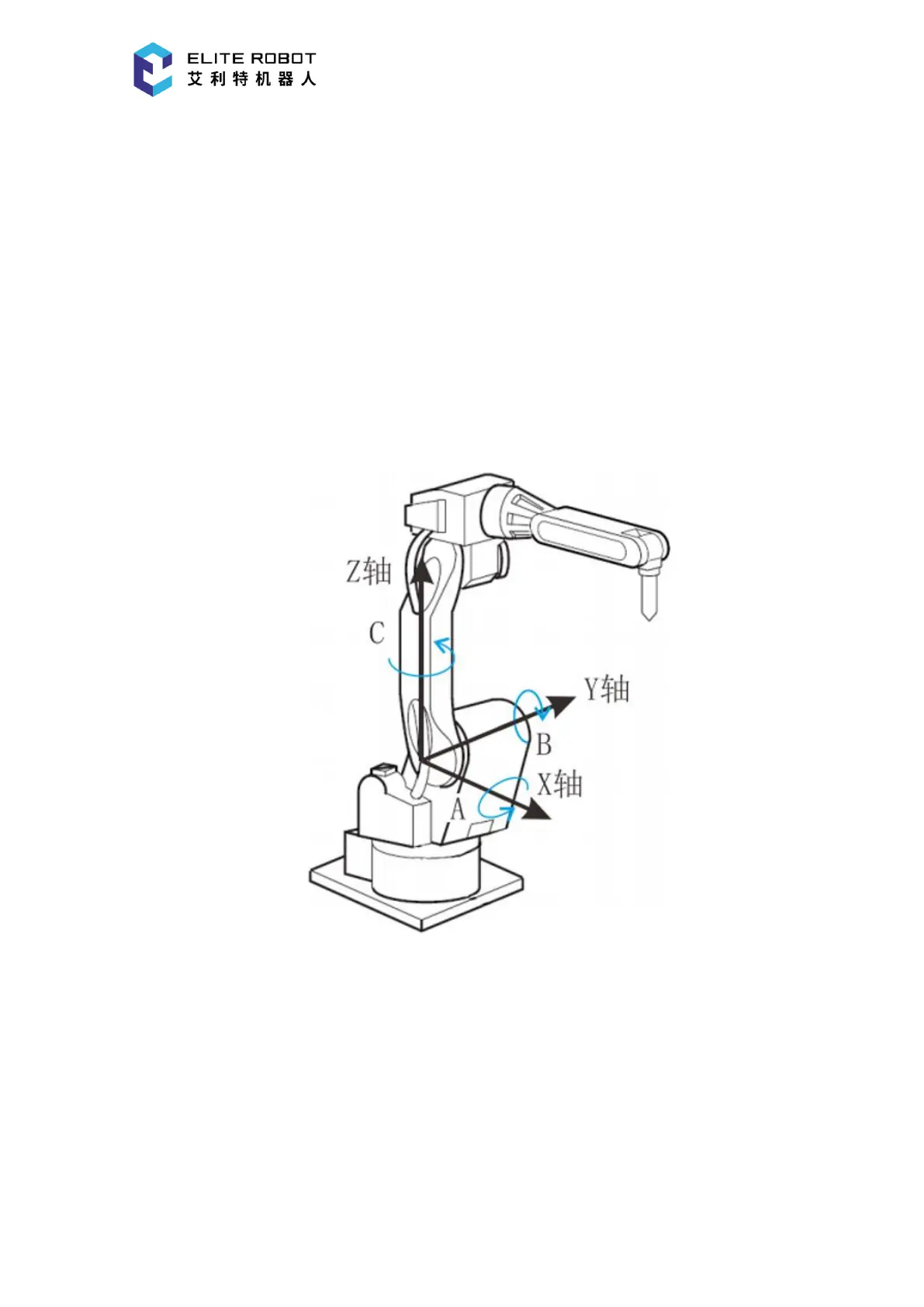
In a non-singular position, the manipulator can move parallel to the X-, Y-, or Z-axes. When
using a manipulator of 6 axes, rotation Rx, Ry, Rz can also be performed, Rx rotates around the X
axis, Ry rotates around the Y axis, and Rz rotates around the Z axis respectively, following the
right-hand rule. Taking a manipulator of 6 axes as an example, the directions of motion are as
shown below.
9.2.2.3 Tool Coordinates
The tool coordinates are defined at the tip of the tool, assuming that the effective direction of
the tool mounted on the manipulator wrist flange is the Z-axis. Therefore, the tool coordinates axis
direction moves with the wrist.
In tool coordinates motion, the manipulator can be moved using the effective tool direction as
a reference regardless of the manipulator position or orientation. These motions are best suited