Caution:
1. Do not disconnect the robot cable when the robot arm is
started.
2. Do not extend or modify the original cable.
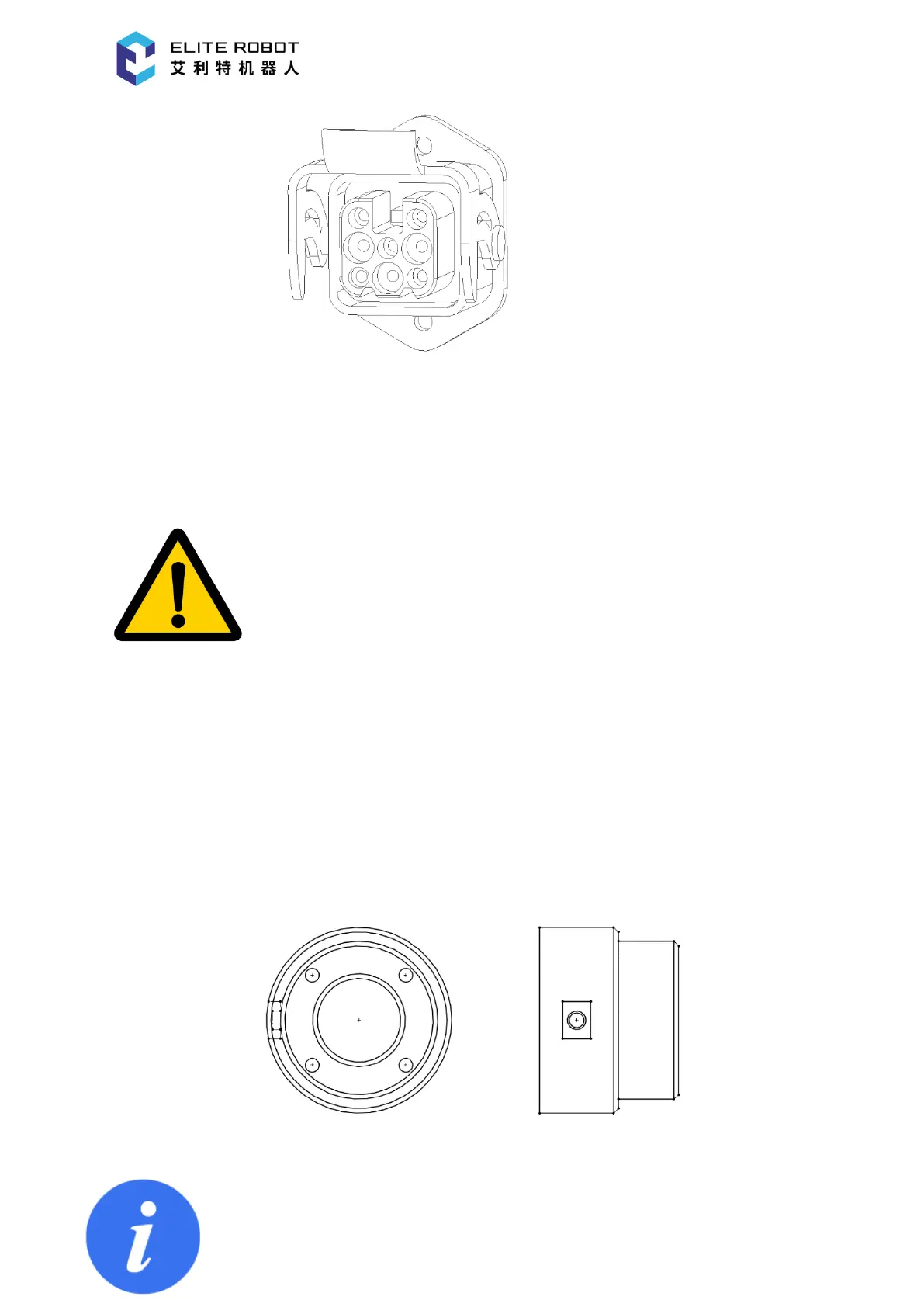
8.7 Tool I/O
A 12-pinned connector is arranged near the tool flange of the collaborative robot end,
for providing the different grippers and sensors connected to the robot with the power
supply and the control signals.
NOTE: