Menu 21 Introduction
Parameter
x.00
Parameter
description format
Keypad and
display
Serial
communications
CT Modbus
RTU
PLC Ladder
programming
CTSoft Menu 0
Advanced parameter
descriptions
190 Commander SK Advanced User Guide
www.controltechniques.com Issue Number: 9
With USA defaults
When this parameter is set to 0 the reference selected depends on the state of bit parameters Pr 1.41 to Pr 1.44. These bits are for control by digital
inputs such that references can be selected by external control. If any of the bits are set, the appropriate reference is selected (indicated by Pr 1.49).
If more than one bit is set the highest numbered will have priority.
In mode 1 and 2 a preset speed will be selected instead of the current or voltage selection if the preset selected is any preset speed other than preset
speed 1. This gives the user the flexibility to be able to select between current and 3 presets, or voltage and 3 presets, with only two digital inputs.
Keypad reference
If Keypad reference is selected, the drive sequencer is controlled directly by the keypad keys and the keypad reference parameter (Pr 1.17) is
selected. The sequencing bits, Pr 6.30 to Pr 6.34, have no effect and jog is disabled.
There is no forward/ reverse button on the drives keypad. If a forward/ reverse is required in keypad mode, see Pr 11.27 for how to set this up.
For existing users of Commander SE:
On Commander SE, Pr 21.03 (Pr 1.14) used to correspond to Pr 05.
On Commander SK, Pr 11.27 corresponds to Pr 05.
If Pr 05 or Pr 11.27 is used in a desired system set-up and then Pr 21.03 (Pr 1.14) is then used to change this set-up, although some of these set-ups
for Pr 05 and Pr 21.03 (Pr 1.14) are the same, the displayed value showing the set-up of Pr 05 (AI.AV, AV.Pr etc.) will not change to the setting of
Pr 21.03 (Pr 1.14).
Defines the acceleration ramp for motor 2.
The acceleration ramp rate units can be change to s/10Hz or s/1000Hz, see Pr 2.39 on page 54 for details.
Defines the deceleration ramp for motor 2.
The deceleration ramp rate units can be change to s/10Hz or s/1000Hz, see Pr 2.21 on page 53 for details.
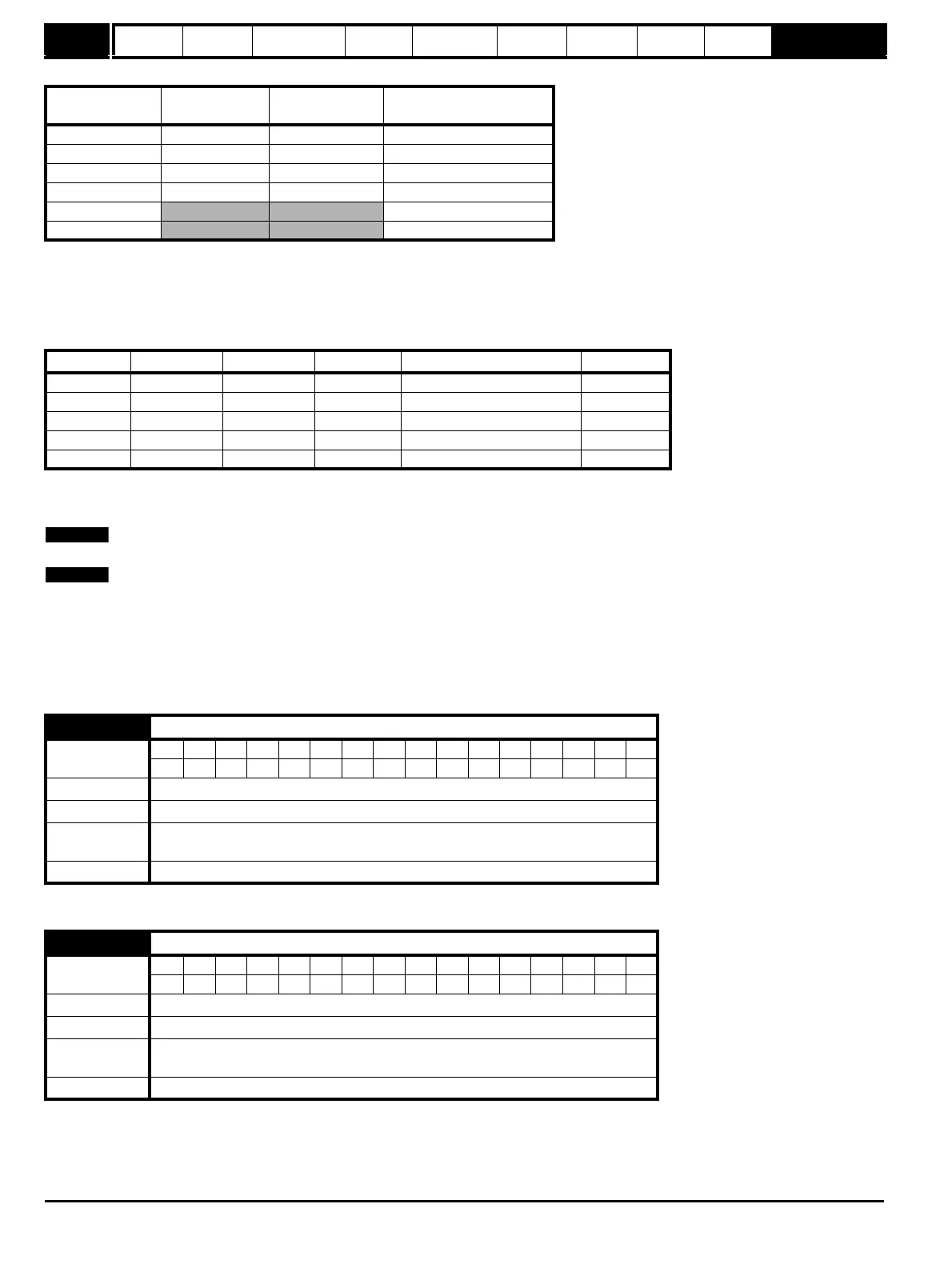
Pr 1.14
Terminal B6
destination
Terminal B7
destination
Pr 1.49
A1.A2(0) Pr 6.31 Pr 1.41 Selected by terminal input
A1.Pr(1) Pr 1.45 Pr 1.46 1
A2.Pr(2) Pr 1.45 Pr 1.46 2
Pr(3) Pr 1.45 Pr 1.46 3
PAd(4)
4
Prc(5)
5
Pr 1.41 Pr 1.42 Pr 1.43 Pr 1.44 Reference selected Pr 1.49
0 0 0 0 Analog reference 1 (A1) 1
1 0 0 0 Analog reference 2 (A2) 2
X 1 0 0 Preset reference (Pr) 3
X X 1 0 Keypad reference (PAd) 4
X X X 1 Precision reference (Prc) 5
21.04 Motor 2 acceleration rate
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Range 0 to 3200.0s/100 Hz
Default 5.0
First motor
parameter
Pr 2.11
Update rate 5ms
21.05 Motor 2 deceleration rate
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Range 0 to 3200.0 s/100 Hz
Default 10.0
First motor
parameter
Pr 2.21
Update rate 5ms